教授 山田 寛喜
1.はじめに
車載ミリ波レーダが広く普及に伴い、様々なシングルチップCMOSミリ波センサの開発が進展している。近年では多送信、多受信(Multiple-Input Multiple-Output, MIMO)での動作が可能であるミリ波MIMOレーダも容易に入手可能となっている。車載センサに関しては、空間分解能が高くデータの理解が容易な光学カメラやLiDARが主流であるが、ミリ波レーダは、ドップラ周波数、すなわち速度の検出に優れており、かつ非金属媒質に対して透過性を有するため、昼夜天候を問わず、前方車両の距離と相対速度を計測する前方監視レーダをしての応用が主なものとなっている。
ミリ波レーダは、その伝搬特性から数mから数百mまでのレーダとしては比較的近距離のターゲット検出が応用範囲となる。様々なレーダ応用においては、距離および角度分解能特性が重要なパラメータといえる。例えば79GHz帯のミリ波MIMOレーダでは76GHz~81GHzをカバーしており、数GHzの帯域幅を利用することにより数cmの距離分解能が容易に実現できる。角度分解能は、使用するレーダ波長に対するアンテナの大きさが問題となる。MIMOレーダでは、複数の送信、受信アンテナを利用することにより、仮想的な大開口アンテナである多素子アレーアンテナを実現し、その受信データに対して電子走査(Digital beamforming, DBF)することにより、アンテナハードウェアの制約を超えた角度分解能を実現している。
広帯域レーダの実現により、距離分解能については、比較的多くのアプリケーションに対応できるものになっているものといえるが、角度分解能に関しては、さらなる高分解能性が求められている。ここでは、筆者らの研究グループで取り組んでいる二つの高分解能レーダイメージング手法とその応用例に関して実験結果を通して概説する。
2.MIMOレーダ
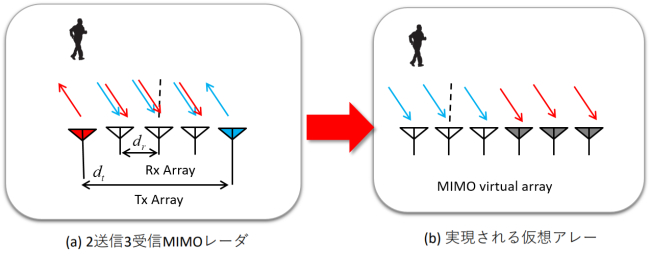
MIMOレーダは、その名から分かるように送信、受信ともに複数のアンテナを用いたレーダシステムである。MIMOレーダの概念は幅広く、レーダ信号の取り扱いにおいてインコヒーレント、コヒーレントのいずれかに分けられる1)。前者は分散レーダシステムにおける検出性能向上、後者は近接した送受信アンテナによる実行開口長(アレー長)増加を目的としたシステムである。最近注目されているMIMOレーダは後者のシステムである。図1はMIMOレーダによるアレー長の増加の概念図である。図1(a)のように等間隔に並べられた3素子のアレーアンテナの両端に2つの送信アンテナが置かれており、それぞれの送信アンテナに対するレーダ応答が得られているものとする。ターゲットが十分に遠方である場合、受信アレーに到来する電波は平面波となり、その平面波近似が成立する範囲において、座標基準(ここでは送信アンテナ)を並行移動することができる。したがって、送受信アンテナ間隔を適切に設定することにより図1(b)のような受信アレーアンテナと等価となる。このようにMIMOレーダでは、送受信アンテナ素子数をそれぞれNt, Ntとして、信号処理によりNt×Nr個のアレーアンテナによる計測と同等の性能を実現することが可能となる。例えば、3送信、4受信のMIMOレーダでは、12素子に相当する角度分解能が実現される。これは分解能改善のみならずハードウェアコストの観点からも有効な処理手法といえる。
限られた送受信アンテナ素子数において、さらに仮想アレー素子数を増大する手法としてCo-primeアレー2)、Khatri-Rao積仮想アレー3)と呼ばれるアレー信号処理手法がある。これらは不等間隔に並べられた送受信アンテナにおける受信信号の2次統計量を利用した信号処理手法であり、レーダにおいても各ターゲットからの応答の相関が低い場合には有効となる。レーダ応答自体は高相関信号であるが、ターゲットが異なる速度を有している場合、異なるドップラ周波数を有しているため、観測時間内でのターゲット間の相関が低くなる場合が多い。この手法を用いることにより、飛躍的に仮想アレー数が増加する4), 5)。
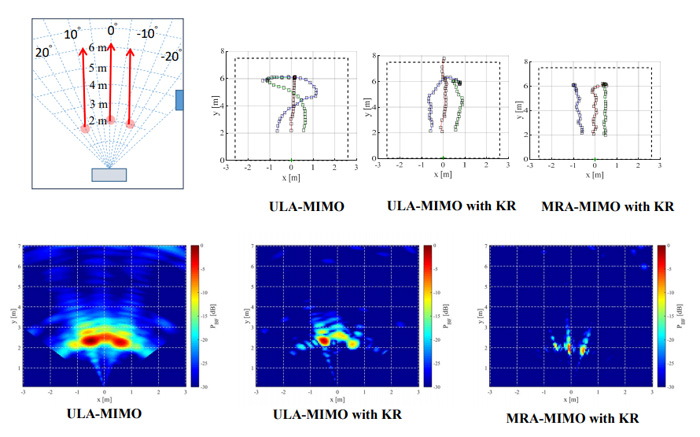
屋内における人物位置推定実験結果を通して、このMIMOレーダの能力を示そう。屋内で3人が並んでレーダ近傍(距離2m)から遠方(6m)程度まで移動した際のレーダイメージング動画とカルマンフィルタによる追尾結果を図2に示した。ここでは中心周波数76.5GHz, 帯域幅500MHzのMIMOレーダを用いており、壁や什器からの不要反射波を抑圧するためMIT (Moving Target Indicator)処理を施している。同図の”ULA-MIMO”が2送信4受信の等間隔配列のMIMOレーダ、”ULA-MIMO with KR”がそのデータに対して上述のKhatri-Rao仮想アレー処理を施したもの、”MRA-MIMO with KR”は受信アレーアンテナを不等間隔とした際の結果である。それぞれ、8素子、15素子、39素子相当のアレーアンテナで角度分離を実現しており、この程度のハードウェア規模でも屋内人物の位置推定、トラッキングは十分実現可能であることがわかる。
このようにMIMOレーダでは、様々な信号処理手法とアンテナ配置を工夫することにより、角度分解能の点においても従来の制約を超えた分解能特性の実現が可能となる。
3.合成開口レーダ
MIMOレーダは、送受信アンテナをアレー化することにより、仮想的な大開口アンテナを実現し、レーダ測定時の欠点である角度分解能特性の改善を図るシステムであった。角度分解能特性の改善手法にはもう一つの有効なアプローチがある。それは合成開口レーダ(Synthetic Aperture Radar, SAR)である6)。合成開口レーダに関しては、すでに人工衛星、航空機による地表観測、海洋観測で実用化されているばかりでなく、近年では地上設置型SAR (Ground-Based SAR, GB-SAR)による崩落危険個所の監視等への応用も進められている。
合成開口レーダ信号処理は、単一送信、単一受信(Single-Input Single-Output, SISO)のレーダシステムで実現可能であり、レーダ装置自体を移動させながらデータを取得し、それらを合成することにより、仮想的に大開口アンテナを実現する手法である。その測定原理の性質上、移動するプラットフォームに取り付けられたレーダに対して有効な信号処理であり、またターゲット側からレーダを見込んだ際の素子の軌跡の広がりが実質的なアンテナ開口となる。したがって、プラットフォームの進行方向に対して直交した方向の観測に適している。
さて、合成開口レーダは、移動に伴う仮想アレーにより角度分解能を改善するという点においてはMIMOレーダと類似であるが、実現される角度(空間)分解能に関しては大きく異なる利点が存在する。それは、理論上、空間分解能が距離によらず一定となる点である。ここでの空間分解能は、MIMOレーダの角度分解能をΔθとした際のターゲットまでの距離rで規定される弧の長さΔd = rΔθを意味している。MIMOレーダの場合、アンテナ開口によりΔθが決定し、距離rの増加に伴い、実際の空間上の長さΔdは増加する。すなわち、同じ距離間隔であっても遠方ターゲットほど分離が困難となる。しかしながら、合成開口レーダの場合は、遠方に存在するターゲットほど実質的な合成開口長(仮想アレー長)が長くなるという特徴がある。これにより距離に依存しない空間分解能が実現される。なお、仮想的にアレーを形成する点に関しては、先のMIMOレーダと類似であるが、MIMOレーダの場合、1つの送信時のターゲットの反射波が複数の受信アンテナ素子(アレーアンテナ)で受信されるのに対し、合成開口レーダでは、送受信アンテナともに移動しながらデータを収集している点が異なる。このため、虚像を生じない素子間隔(合成開口レーダの場合は、レーダの移動間隔)がMIMOの場合は中心波長の半波長であるのに対し、合成開口レーダでは、その半分の1/4波長となる。ただし、実際には送受ともにある程度の指向性利得を有する素子(ビーム幅の狭い素子)を利用するため、その制約は緩和される。
次回に続く-
参考文献
1) J. Li and P. Stoica, MIMO radar signal processing, Wiley, 2009
2) 例えば、S.Qin, et al, “Generalized Coprime Array Configuration for Direction-of-Arrival Estimation,” IEEE Trans. Signal Process., vol.63, no.6, pp.1377-1390, Mar. 2015.
3) 例えば、W.K.Ma, et al, “DOA Estimation of Quasi-Stationary Signals with Less Sensors than Sources and Unknown Spatial Noise Covariance: A Khatri-Rao Subspace Approach,” IEEE Trans Signal Process., vol.58, no. 4, pp.2168-2180, Apr. 2010.
4) Y. Wakamatsu, H. Yamada, Y. Yamaguchi, “MIMO Doppler Radar Using Khatri-Rao Product Virtual Array for Indoor Human Detection,” IEICE Trans. Communications, Vol.E99-B, No.1, pp.124-133, Jan. 2016.
5) J. Konishi, H. Yamada, Y. Yamaguchi, “Optimum element arrangements in MIMO radar using Khatri-Rao product virtual array processing,” IEICE Communications Express, vol. 7, no.11, p. 407-414, Nov. 2018.
6) 例えば、大内和夫著、リモートセンシングのための合成開口レーダの基礎、東京電機大学出版局、2004年
【著者紹介】
山田 寛喜(やまだ ひろよし)
新潟大学工学部工学科 知能情報システムプログラム 教授 工学博士
■略歴
1993年3月 北海道大学大学院博士課程修了、新潟大学工学部情報工学科助手、講師、助教授を経て、
2008年1月より情報工学科(現在、工学科知能情報システムプログラム)教授。現在に至る。
その間、2000年6月~2001年3月、NASAジェット推進研究所客員研究員
2001年4月~2008年3月、国際電気通信基礎研究所(ATR)、客員研究員を併任。