
(東北大学 マイクロシステム融合研究開発センター)
4. 静電浮上回転ジャイロ (センサ + 回路 + アクチュエータ)
高精度に2軸の角速度や角度を検出できる静電浮上回転ジャイロが1952年にイリノイ大学で開発された12)。その構造を図12に示してある。原子力潜水艦の場合に、水中では人工衛星からのGPSの電波を受信できないが、この静電浮上回転ジャイロを用いることによって高精度な航行制御が可能になった。この場合直径5cm程の金属球が、浮上用電極との間の静電容量と外部コイルによる共振特性を利用した受動回路により真空中で浮上する。球の重心は中心から僅かにずれて偏心しており、それを利用し毎分12,000回転させる。
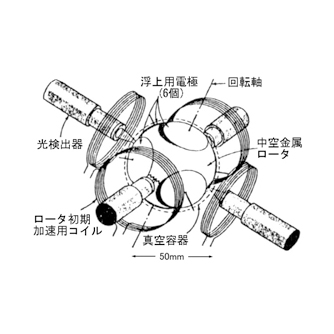
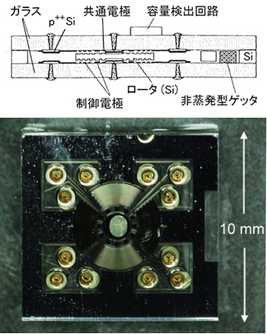
図13はMEMS技術で開発されたディスク型静電浮上回転ジャイロである13)。シリコン板の上下にガラス板が陽極接合してあり、内部で直径5mmの円盤が浮上して回転する。空気の粘性による摩擦を無くするため内部を真空にしている。このために真空中で接合し、また接合時にガラスが分解して発生する酸素ガスを吸着する目的で非蒸発型ゲッタを入れてある。ガラスの内側に電極を形成してあり、円盤と電極との間の静電容量から円盤の位置を検出し、電極に電圧を印加して静電引力を発生させる。これを全方向で行って円盤を浮上・回転させる。回転速度は毎分10,000回転で、浮上のための電圧から3軸加速度、また円盤の回転軸に垂直な2軸の角速度を測定できる。しかしこの構造では円盤を横方向に動かすのに、電極の重なりを変化させる静電アクチュエータを使用しているため大きな駆動電圧(±30V)が必要である。そのためこれを改良したリング型静電浮上回転ジャイロが開発し実用化された。
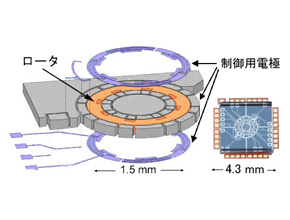
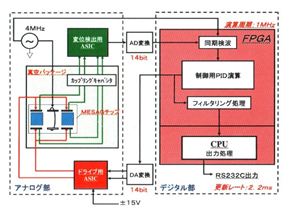
リング型静電浮上回転ジャイロは図14に示すように外径1.5mmのシリコンリングが浮上し、毎分74,000回転する14)。これは真空にしたパッケージに入れて使用される。電極間隔が変わる方向に静電引力を発生させることで、駆動電圧を減らすことができる。このリング型静電浮上回転ジャイロの制御回路には、図15に示すような高速ディジタル制御を使用する。加速度検出と角速度検出の分解能は、それぞれ2μm/s2、0.01deg/sで高い性能を示す。このようにMEMS技術で小形化し、静電容量型センサやディジタル制御および静電アクチュエータを組み合わせている。
このリング型静電浮上回転ジャイロは、高速ディジタル制御を用いるため消費電力が大きく携帯機器などには適していない。また高速回転で使うために立ち上がりに時間がかかる欠点があり自動車などにも使いにくい。このため東京の地下鉄などの走行中の車体の動きを計測する、モーションロガーに使用されている。
文献
12) H. W. Knoebel, The electric vacuum gyro, Control Engng, 11, 2 (1964) 70-73
13) K. Fukatsu, T. Murakoshi, K. Minami and M. Esashi, Measurements of electrostatic force and capacitance for electro-statically levitating inertia measurement system, Technical Digest of the 15th Sensor Symposium (1997) 39-42
14) T. Murakoshi, Y. Endo, K. Fukatsu, K. Sigeru, S. Nakamura and M. Esashi, Electrostatically levitated ring-shaped rotational-gyro/accelerometer, Jpn. J. Appli. Phys., 42, Part1 No.4B (2003) 2468-2472