(株)トリマティス
代表取締役

(株)トリマティス
マネージャー
1.はじめに
LiDAR(Light Detection and Ranging)は、レーザー光を対象物に照射し、対象物との距離によって、反射光の到着時間が異なることを利用して距離を測定する装置である1)。またLiDARは、空間分解能が数cm以下と高く、計算機の性能向上もあって、多点測定による対象物の形状把握に適用できる。そのため、最近では、電波の損失の大きい水中や海中の探査、河川や電波を反射しにくい非金属物質が分布する地形の探査、自動運転のセンサなどに、LiDARが広く利用されている。
特に、最近の自動運転の機運の高まりにより、今後、自動運転向けのセンサとしてのLiDARの市場が立ち上がり2)、LiDARの小型・低コスト化が進み、その普及にはずみがかかることが期待されている。しかしながら、国内で入手できる主力LiDAR製品は、ほとんどが海外(米国・欧州)メーカー製であり、国内メーカーの多くは自動運転向けに研究開発を続けており、市場投入に関しては、海外メーカーの後塵を拝している。一方、これからの市場拡大が期待される水中や海中向けのLiDARについては、ほとんどが学術研究分野での利用にとどまっており、普及に向けた今後の研究開発が期待されている。
ここでは、LiDARの技術動向と、これからの市場拡大が期待される水中LiDARへの取り組みについて紹介する。
2.LiDAR
2.1 LiDARの種別
LiDARは、一般的には、パルス状のレーザー光を対象物に照射し、反射光の戻ってくる時間が対象物との距離によって異なることを利用して距離を測定する装置である。その他に周波数変調された連続光を用い、反射光との周波数差(ビート周波数)により距離を求めるLiDAR3)や、ドップラー効果を利用し対象物の変異や相対速度を計測するLiDAR4)もあるが、ここでは最も一般的なパルス光源を用いた距離測定に用いられるLiDARの原理について説明する。
パルス光を用いたLiDARの原理を図1に示す。LiDARは、パルス光を投光するレーザー光源と反射光を受光する受光素子で構成されており、TOF(Time of Flight)方式により対象物からの反射光の戻ってくる時間(往復伝搬時間t)を計測することで、対象物との距離を求めている。
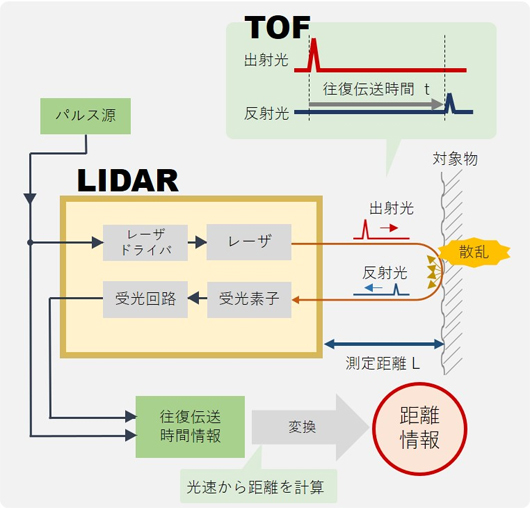
またLiDARは、高い空間分解能を有することから、多点観測による対象物の形状把握に使われることが多い。多点測定を行うLiDARの種別とその装置構成を表1に示す。多点観測を行うLiDARは、走査型(スキャナー型)と非走査型(フラッシュ型)の2種類に大別される。走査型は、パルス変調したLDなどのパルス光源を用い、細く絞った投光ビームを走査し、1ポイントずつ距離測定を行う。ビームを絞るため遠距離まで測定が可能である。受光部には、高感度なSPAD(Single Photon Avalanche Diode) 、MPPC(Multi-pixel Photon Counter)、PMT(Photo Multiplier Tube)などが用いられる。
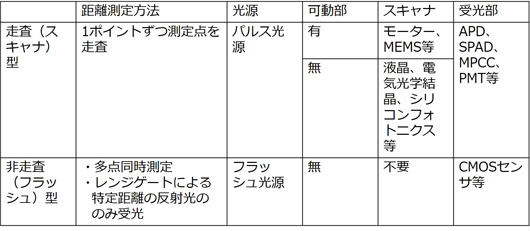
また、走査型は、モーターやMEMS(Micro Electro Mechanical Systems)によりミラーを振りビームの反射方向を変える可動式と、液晶・電気光学結晶・シリコンフォトニクスなどにより光経路を変えることでビーム出射方向を変える非可動式がある。MEMSや可動部の無い非可動式の方が、モーターに比べ故障が少なく信頼性が高いため、実用化が期待されている。
非走査型は、広角に広がった強いフラッシュ光を出射し、CMOSセンサなどで多点を同時に距離測定する。測定距離毎にゲートをかけ、特定距離の反射光のみを受光することで距離測定を可能としている。また測定距離毎に短時間露光を繰り返し、感度を向上させることができる。
次週に続く-
参考文献
1) P. F. McManamon: “Review of lidar: a historic, yet emerging, sensor technology with rich phenomenology,” Opt. Eng., 51 (2012) 060901.
2) OPTRONICS ONLINE ニュース(2018年6月29日)http://www.optronics-media.com/news/20180629/51823/
3) C. V. Poulton, et al.: “Frequency-modulated continuous-wave LiDAR module in silicon photonics,” OFC 2016, W4E.3.pdf.
4) F. Heide, et al.: “Doppler time-of-flight imaging,” L. ACM Transaction on Graphics, 34 (2015), article 36.
著者略歴
島田 雄史 (しまだたけし)
• 1994年 4月国際証券株式会社(現三菱UFJモルガン・スタンレー証券)入社
• 1995年 9月株式会社応用光電研究室(現在は消滅)入社
• 2001年 7月株式会社オプトクエスト設立に参加
• 2002年 8月富士通東日本ディジタル・テクノロジ株式会社(現在は富士通に吸収)入社
• 2004年 1月有限会社トリマティス(現株式会社トリマティス)設立、代表取締役 CEOに就任
• 2018年一般社団法人電子情報技術産業協会(JEITA)の共創プログラムであるALANコンソーシアムの代表にも就任
鈴木 謙一(すずき けんいち)
• 1990年4月日本電信電話株式会社入社
• 2009年3月博士(情報科学)取得(北海道大学大学院博士後期課程修了)
• 2011年IEEE1904.1 SIEPON WG(現IEEE1904 ANWG)副議長
• 2012年8月HATS推進会議光アクセスAd-hoc WG(現光アクセス相互接続連絡会主査
• 2013年4月日本電信電話株式会社NTTアクセスサービスシステム研究所グループリーダ
• 2019年2月株式会社トリマティス入社