
東北学院大学 教授
松尾 行雄
1.はじめに
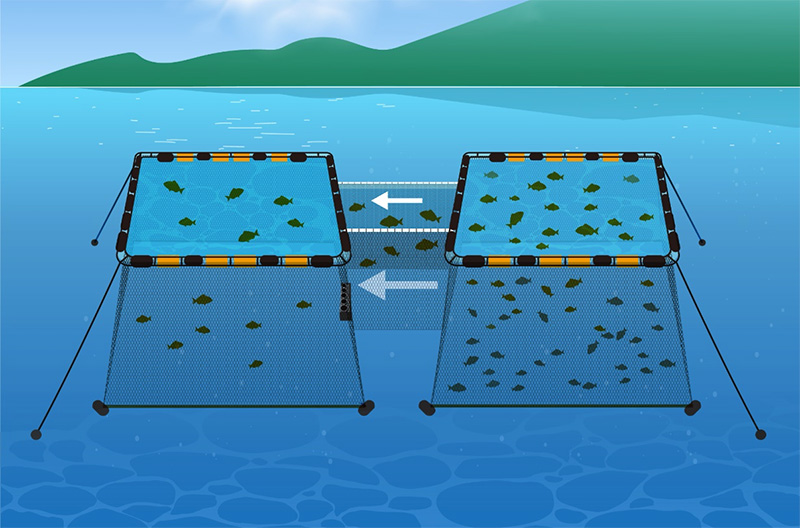
養殖漁業には海面養殖と陸上養殖がある.海面養殖の場合,海中に網の生簀を作り,その中で魚介類を養殖している.稚魚の段階で海面の生簀にいれて生育を始めるが,魚の成長とともに生簀内が狭くなる.生簀内の養殖魚を適切な密度に保つため,養殖魚が成長すると「分養」という,一部の魚を他の生簀に移す作業が行われる.生簀内の密度を生育に適した状態に保つためには予定した個体数を確実に分養する必要があり,いくつかの方法で分養が行われている.例えば,タモ網で魚をすくって隣の生簀に移す方法がある.この場合,1回ですくえる尾数には限界があり,数千尾の分養においても時間と労力がかかる.その10倍以上の数万尾の分養の場合には,タモ網ですくう方法では時間的にも労力的にもおおきな問題となる.そこで,短時間に分養する方法として,生簀と生簀の網の一部をつなぐことで魚道をつくり,分養させる方法がある.この時の分養の様子を模式的に図1に示す.この場合,魚道を通過する魚の尾数を目視でカウントしているが,大量の魚が同時に通過するため,目視で正確な通過尾数を把握することことは困難であり,分養における根本的な課題となっていた.これまでに,水中カメラを用いた方法も提案されているが,マダイの分養のように密に魚が移動する場合,前の魚の存在により後の魚を遮蔽するため,密度によっては魚道を通過するすべての魚を把握することができなくなる可能性がでてくる.この課題を解決するために開発された超音波を活用した生簀の自動尾数計測システムMagicCounterについて本稿では紹介する.次項では,最初に魚群探知機の特徴,ならびに,超音波を用いた魚検知原理について紹介する.そのあとに,MagicCounterについて紹介する.
2.超音波を用いた魚検知原理
超音波を用いた魚検知は魚群探知機を用いて,研究・開発が行われている.魚群探知機の原理は,超音波を送信し,反射してきたエコーを受信し,受信したエコーを表示するものである.計測されたエコーを用いて魚の資源量評価に活用されたり,漁業者の漁の判断などに用いられている.従来の魚群探知機では狭帯域信号を用いて,エコーを計測しているため,一尾一尾の魚の反射としてではなく,その名の通り,魚群としての反応を計測できるが,一尾一尾の魚のエコーを分離してとらえることができない.それに対し,広帯域信号を送受信できるシステムが2000年代に開発され,広い周波数帯域幅により距離分解能を向上させることで,魚群ではなく魚1尾ごとにエコーを検知できるようになった1).狭帯域信号と広帯域信号の魚群からのエコーの差を模式的に表したのが図2である.AquaFusionでは,携帯電話等の通信で使用されている疑似雑音符号を用いた高解像度魚群探知機AquaMagicを開発した2,3).疑似雑音信号の1種であるゴールドコードの符号に合わせて位相変調させ送信信号を用いている.具体的には,送信周波数は240kHzで,送信長は1.05msの信号となる.送信回数を1秒間に20回程度まで上げることにより,従来と比べて10倍程度になるのでより精度の高い水中探査が可能となり,現在漁業者だけでなく,資源量評価のための魚群探知機として活用されている.
これら広帯域信号や疑似雑音信号を用いた場合,受信した信号を送信信号との相関解析を行い,深度ごとのエコーデータとして評価できる.ここでは,カタクチイワシを対象とした結果例を示す.カタクチイワシは数cm程度の魚体長で煮干しの原料でもあり,海洋生態系においても重要な役割を果たしている.また,密な魚群を構成していることから,一尾一尾とらえることが困難な魚種の一つである.図3(a)にカタクチイワシの魚群に対して,高解像度魚群探知機AquaMagicで計測したエコーデータを示す4).エコー強度をグレイスケールで表示しており,相関解析により分解能が数cm程度となり,カタクチイワシの魚群に対して,個々の魚を分離できている.分離された個々のエコー強度から距離深度補正等を行うことによって魚の反射強度(TS)を計算し,魚体長を評価できる.図3(b)に検出された魚の体長分布を示す.数cm程度の魚群であり,かつその尾数も評価できる.MagicCounterでは,このような単体検知アルゴリズムを活用して,生簀間の魚道を通過する尾数をカウントする.
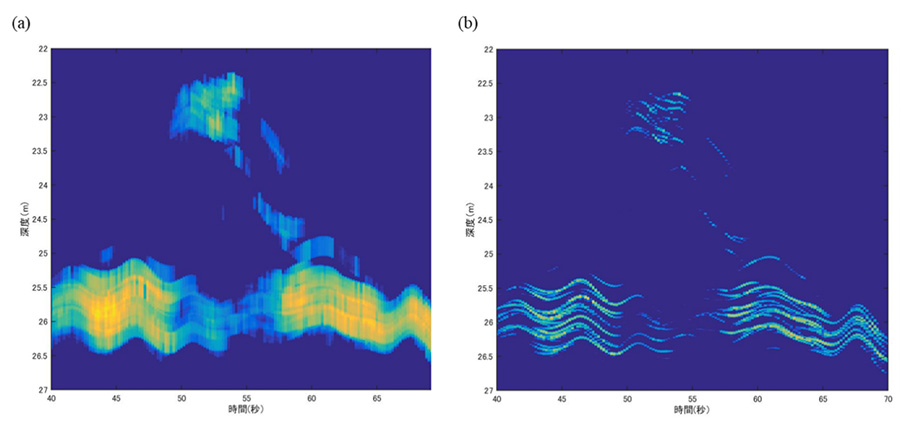
(左)狭帯域信号を用いた魚群探知機のエコーグラム,(右)広帯域信号を用いた魚群探知機のエコーグラム.
広帯域信号を用いることで,魚単体のエコーを分離できている.
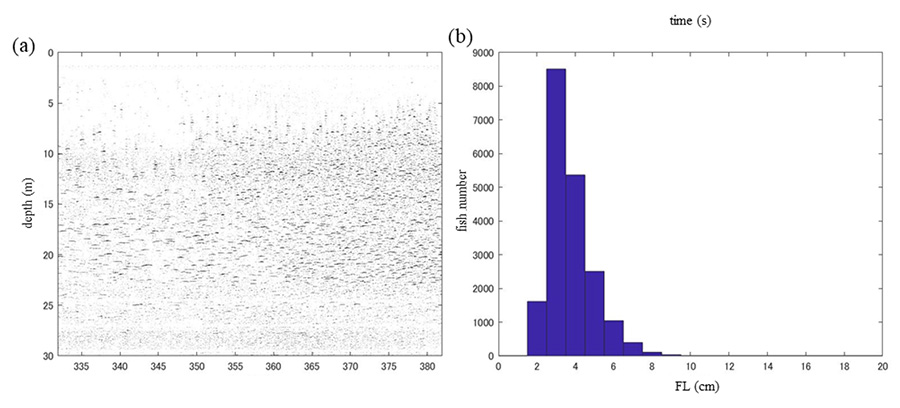
(a) エコーグラム(横軸が時間,縦軸が深度),(b) 検出された魚体長分布(松尾(2022)の図2を引用).
次回に続く-
参考文献
- I. Matsuo, T. Imaizumi, T. Akamatsu, M. Furusawa, Y. Nishimori : Analysis of the temporal structure of fish echoes using the dolphin broadband sonar signal, J. Acoust. Soc. Ame. 126, 444/450 (2009)
- 松尾行雄, 笹倉豊喜,“疑似雑音系列信号を用いた海底探査アルゴリズムと実測による評価I”, 海洋音響学会講演論文集,53-54 (2016).
- 松尾行雄,笹倉豊喜,“高速送信周期エコーサウンダーAquaMagicを用いた魚群密度・魚体長の推定アルゴリズムの開発”,海洋音響学会講演論文集,19-20 (2020).
- 松尾行雄,“野生水中生物探査に挑む”,計測と制御,61, 15-20 (2022).
【著者紹介】
松尾 行雄(まつお いくお)
株式会社AquaFusion取締役 / 東北学院大学教授
■略歴
次世代水中可視化システムを開発するAquaFusionの共同創業者・取締役.山口県出身.2000 年東北大学大学院工学研究科電気・通信工学科博士課程退学.2001 年博士(工学).2000年から東北大学電気通信研究所助手,産学連携研究員等を経て,2005年東北学院大学教養学部准教授,2015年同教授となり,現在に至る.2017年株式会社AquaFusion設立.