

1 はじめに
近年、日本ではインフラの老朽化 (図 1) が問題となっており、港湾施設や橋脚等の水域インフラも例外ではない。これらの点検は、潜水士が水に潜って担うが、高齢化に伴う人材不足や安全確保が課題となっている。また水産業においても、養殖場の巡回点検を頻繁に行う必要があるが、漁業従事者の減少により人手不足 (図 2) が課題になっている。
![図 1 日本のインフラの老朽化状況 [1]](https://sensait.jp/wp-content/uploads/2022/09/kawada_nishitani_kojima_01.png)
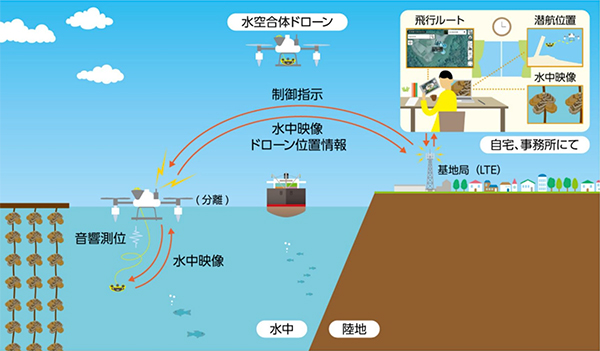
これらの課題に対応するため筆者らは、「水空合体ドローン」を試作した [3, 4]。これは、空中ドローンが水中ドローンを抱えて飛んでいき、作業水域で水中ドローンが離脱・潜航、作業終了後にそれを回収、離水して再び陸上拠点に戻ってくるというものである (図 3)。作業水域への往復は LTE を介した自動飛行で行い、また LTE 経由で水中映像をリアルタイムで陸上から監視可能である。
このシステムを実用化するためには、水中ドローンの位置が陸上拠点から把握できなければならない。その主な理由は次の 2 点である。(1) 水中ドローンを遠隔から操縦するために必要。(2) 送られてきた水中映像で異常個所が発見できたとしても、それがどこかわからないと、直すために潜った潜水士がまた場所を探すところから始めなければならなくなる。
水中では GPS は使えないので、音響測位技術を利用する。本稿では、この私たちの水空合体ドローンに搭載している音響測位技術 [5, 6] について説明する。
![図 2 日本の漁業従事者の減少状況 [2]](https://sensait.jp/wp-content/uploads/2022/09/kawada_nishitani_kojima_02.png)
2 水空合体ドローンとその音響測位への要件
図 4 と表 1 にそれぞれ試作した水空合体ドローンの写真と主要諸元を示す。このように中サイズの空中ドローンの下部に開閉可能なケージを取り付け、そこに市販の水中ドローンを格納している。水中ドローンと空中ドローンはテザーケーブルで接続されており、ここを制御信号及び映像信号が通る。水中ドローンの作業範囲としては、空中ドローンから数十メートルの範囲を想定している。
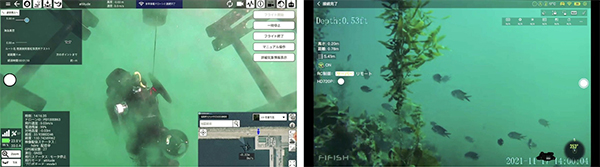
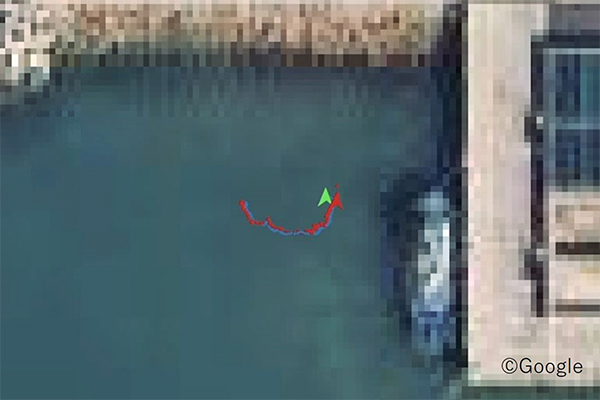
空中ドローンは LTE 回線を有し、KDDI スマートドローンプラットフォーム [7] のもとで動作する。陸上の拠点から目的の水域まで自動飛行し、着水する。その後はオペレータが水中ドローンの離脱・潜航・作業後の回収を遠隔で操作する (図 3)。その間、水中ドローン及び空中ドローンからの映像が LTE 経由で陸上拠点へ生中継される (図 5)。また水中ドローンと空中ドローンの位置が図 6 のように表示される。
以上のような水空合体ドローンにおける水中ドローンの測位に関しては、次のような要件があげられる。
- 水中ドローン側はもちろんのこと、空中ドローン側も装置は小さく軽いことが重要である。

| 空中ドローン | サイズ | 1640mm×1640mm×760mm |
|---|---|---|
| 重さ | 21kg(水中ドローン含む) | |
| 耐風性 | 最大風速 10m/s | |
| 飛行時間 | 最大 15 分間 | |
| 飛行速度 | 40km/h | |
| 水中ドローン (QYSEA FIFISH V6 PLUS) |
サイズ | 383mm×331mm×143mm |
| 重さ | 5kg | |
| 潜水深度 | 最大 150m | |
| 最大稼働時間 | 最大 5 時間 | |
| 速度 | 最大 1.5m/s | |
| テザーケーブル | 12m(実験用に付替え) |
- 浅海域でも正確に測定できる必要がある。すなわち、反射波等の妨害に強い必要がある。
- 空中ドローン・水中ドローンのコスト感に合うものである必要がある。つまり従来の同等の音響測位装置に比べて低コストである必要がある。したがって INS(慣性航法装置) 等の高価な装置は望ましくない。
- 今後はダイバーとドローンが同時に作業したり、複数のドローンが同時に作業したりするようになることが想定される。この場合複数のターゲットを同時に測位する必要がある。
次回に続く-
参考文献
- 国土交通省:“社会資本の老朽化の現状と将来”,
https://www.mlit.go.jp/sogoseisaku/maintenance/02research/02_01.html (参照 2022-09-04). - 水産庁:“令和 3 年度水産白書”, https://www.jfa.maff.go.jp/j/kikaku/wpaper/index.html (参照 2022-09-04).
- 西谷, 川田, 小島, 三輪, 松木, 博野:“水空合体ドローンの開発”, 日本ロボット学会学術講演会, No. 1B4-1 (2021).
- A. Nishitani, R. Kawada, J. Kojima and K. Yoshihara: “Development of combined aerial and underwater drone system”, Proc. IEEE Oceans (2022).
- 川田, 西谷, 小島:“水空合体ドローン向け音響測位方式の検討”, 海洋音響学会研究発表会講演論文集, No. 22-2, pp. 3–4 (2022).
- R. Kawada, A. Nishitani and J. Kojima: “Acoustic positioning system of combined aerial and underwater drones”, Proc. IEEE Oceans (2022).
- 博野, 松木, 杉田, 田中:“スマートドローン実現に向けた取組み”, 電子情報通信学会誌, Vol.102, No.6, pp. 517–519 (2019).
【著者紹介】
川田 亮一(かわだ りょういち)
■略歴
1991年,東大大学院了.同年,現KDDI入社,研究所に勤務.映像処理,特に動き補正TV方式変換,画質評価/監視,画像符号化などの研究 開発に従事.1997~1998年,米コロンビア大客員研究員.2014~2016年,慶大SFC上席研究員(W3Cフェロー).2016~2018年,内閣府上席政策調査員.現在,水空合体ドローンの音響測位技術の研究開発に従事.博士(工学).
西谷 明彦(にしたに あきひこ)
■略歴
1986年,鹿児島県立鹿屋高卒.現 KDDI 入社後は,OSI 通信,分散システム,サイレント障害検知技術に関する研究に従事後,研究フィールドを海洋に移す.2016年より深海探査技術の世界大会に,日本チーム(Team KUROSHIO)の一員として挑戦.2019年より海中光無線技術の応用研究,水空合体ドローンの開発等に取り組み中.
小島 淳一(こじま じゅんいち)
■略歴
1981年,東工大大学院工学研究科修士課程了,国際電信電話株式会社(現KDDI株式会社)入社,海底ケーブルの保守・点検に関連する研究開発に従事.海底ケーブル調査・点検用の自律海中ロボット(AUV)を開発.近年は水中音響技術を応用した研究開発を行う.2021年,定年退職し現在に至る.2016年,科学技術賞(開発部門)受賞,IEEE会員.