井上 喜彦
1.はじめに
これまで画像計測は、輝度や色の面分布情報を利用することが一般的であったが、近年はこれらに加えて光の波の振動方向の情報、即ち偏光情報を画像情報として取得し、これを利用する偏光画像計測の応用への機運が高まってきている。
その要因として、偏光をイメージング情報として取得可能な偏光カメラが開発され、その入手性が向上してきたことが挙げられる。その一方で、得られた情報の光学的な意味や活用方法についての知見の不足から、偏光カメラを有効に活用できない場合も多い。
本稿では、偏光カメラとその種類、応用分野を紹介するとともに、偏光の理解に有効なツールを紹介することで、偏光情報の有効活用と市場拡大に繋がることを期待する。
2.偏光カメラとその応用分野
本稿では、偏光カメラを『面分布の偏光情報を(比較的短時間に)取得できるカメラ』と定義する。通常のカメラは、光に含まれる基本情報としての輝度分布、色分布を取得しているが、そのままでは偏光情報を取得することはできない。そこで、次章に紹介する様々な工夫により、2000年代に入って、偏光情報を取得できるカメラが実用化されてきた。
偏光カメラが市場に登場した当初は、偏光イメージングの可能性に多くの期待が寄せられたが、現在でもその応用分野は極めて限定的である。その主な理由は、二つ挙げられる。
一つ目の理由は、「偏光情報の理解のしにくさ」である。先に記した通常のカメラで扱う輝度分布や色分布は直感的に理解することが容易であり、その応用範囲も広い。しかし、偏光は実体験として触れる機会が少ない。例えば、偏光の最大の応用市場とも言える液晶ディスプレイも、最終的には輝度と色の情報を映し出すのが機能であり、その原理を理解せずに恩恵にあずかる場合がほとんどである。理解が広まりにくい技術の市場拡大に時間がかかることは当然とも言える。
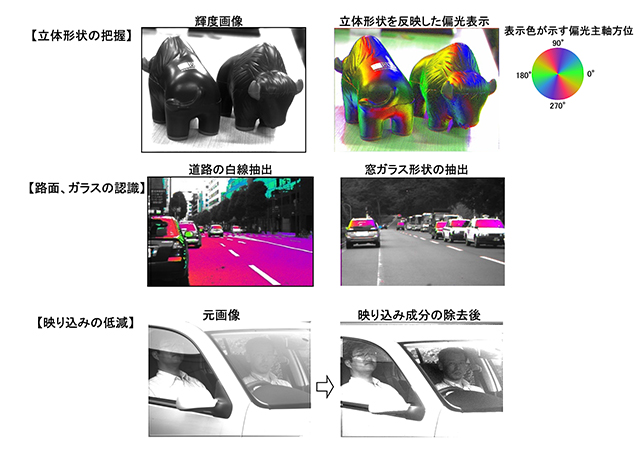
もう一つの理由は。「偏光カメラで得られる情報のロバスト性確保の難しさ」である。偏光情報には、撮影対象である物体の面の向き、材質だけではなく、物質の表面粗さ、光源の位置や偏光状態などの影響を強く受ける。この為、偏光カメラの応用として挙げられてきた、立体形状の認識や、ガラス表面の映り込みの低減や、偏光に特徴的な特性を持つ物体の特定など(図1)は、限定的な条件下では有効に機能するものの、異なる環境下で同じ性能を発揮することは困難である。特に屋外環境の様に、朝、昼、夜の太陽の位置や有無の違いあり、更に雨や雪が降る場合も想定される環境下、偏光カメラの有効活用への困難さは高まる。
このため、偏光カメラの主な用途は、光源の位置や偏光状態を固定でき、測定対象も限定できる、屋内の計測用途である。例えば、透明な測定対象の分子配向や応力などにより発生する光学異方性(複屈折)は、透過光の偏光状態を変化させる。従って、測定対象を透過する前後の偏光情報を偏光カメラで取得し、これらを比較演算することで複屈折の定量評価装置が実現し、その適用範囲は広がってきている。また、レーザー光の偏光分布などをリアルタイムに計測する用途にも有用性が高い。
3.偏光カメラの種類
3.1 偏光カメラの基本構造での分類
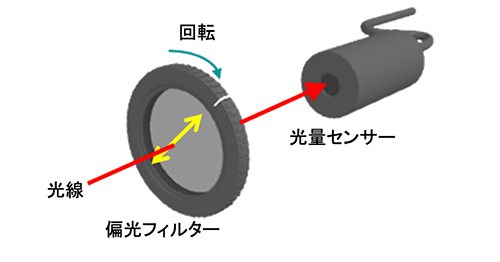
偏光情報の定量計測の基本は、回転する偏光フィルターを含む光学系の透過光量を、光量センサで計測し(図2)、これを演算することである。従来は、一般的には光量センサには点計測用のセンサが用いられた。その主な理由は、点計測センサの代わりにイメージセンサを用いた場合、回転する偏光フィルターにより生じる光軸のブレが、イメージセンサの画素レベル以下に抑えることが難しく、透過光量の変化が、計測する偏光情報に基づいて変化したのか、画像の明暗分布により変化したのか区別がつかなくなってしまう問題があった為である。
そこで近年では、偏光フィルターを実際に回転させることなく、しかし光学的には偏光フィルターを回転させたことと等価な情報を得る様々な工夫により、面分布の偏光情報を計測できる装置が開発された。その手法は、大きく3つの種類がある(図3)。
一つ目の手法は、可変な光学特性を持つデバイスを用いて、偏光フィルターを回した場合と同様な情報を得る手法である(図3(a))。このデバイスには、液晶やPEM(光弾性変調器)が用いられる。こうした、可変デバイスを組み込んだシステムは、計測装置として実用化されている。欠点としては、高い精度や安定性を維持する為に可変デバイスのキャリブレーションの手間が欠かせないこと、手軽に屋外に持ち出して計測するような用途には不向きなこととに加えて、複数フレームのデータを比較する必要がある為、超高速な測定は原理上不可能な点が挙げられる。
二つ目の手法は、画像全体をプリズムなどで分離し、それぞれを複数枚のイメージセンサで取得する方法である(図3(b))。この手法には、プリズム自体に偏光分離機能を持たせたタイプと、出来るだけ偏光依存性の小さなプリズムを用いてイメージセンサの直前に偏光フィルターを配置するタイプがある。しかし、偏光情報を定量計測する為には、少なくても3つ以上の偏光情報に分離する必要があり、これを実現するプリズムの構成が複雑になりやすく、且つこれらのセンサを画素レベルで正確に位置決めする必要があることなどにより、コストや性能の安定面などの課題がある。このため、現時点では、プリズムで2方向のみに分離した偏光画像を比較した情報を出力する簡易的な製品だけが市場に見られる。
三つ目の手法は、偏光フィルターを回す代わりに、向きの異なる微細な偏光フィルターが多数集積された集積偏光フィルターを用いる手法である(図3(c))。集積偏光フィルターはイメージセンサと一体化され、その一領域のサイズは、イメージセンサの画素サイズに合わせて決められる。この手法の利点は、駆動部や精密な制御装置なしに、通常のデジタルカメラと程同等の手軽さで偏光計測が可能になる点である。更に、1フレームの画像情報から偏光情報を演算できることから、高速度センサとの組み合わせにより、超高速な偏光計測が可能になる点も大きな利点である。一方で、一つの偏光情報の演算に複数画素の情報を用いる原理上、これらの画素には同一の偏光情報が入射していることを仮定する必要がある。従って、解像度に近い細かな偏光の空間変化がある情報を撮影した場合、モアレと呼ばれる疑似情報が発生する、という欠点がある。とはいえ、総合的には利点の方が勝る場合が多く、現在市場にある偏光カメラの多くはこのタイプである。
3.2 集積偏光フィルター内蔵タイプの分類
上記の3つ目の方式である集積偏光フィルターを内蔵した偏光センサは、偏光フィルターの機能によって2種類に大別される。一方は偏光フィルターの機能が偏光子のタイプであり、他方は波長板のタイプである。それぞれが、偏光子と波長板を回転させたときに得られる情報を取得することから、実際に回転動作は行われていないが、便宜上前者を「偏光子回転型」、後者を「波長板回転型」とよぶ。
偏光子は、一方向の振動成分を吸収する機能を有し、一般的な偏光フィルムと基本的に同じと考えてよい。但し、偏光フィルムで集積フィルターを作ることは困難であり、ワイヤーグリッド偏光子やフォトニック結晶偏光子を内蔵した偏光センサが製品化されている。
もう一方の波長板は、透過光の偏光状態を変化させる機能を持ち、その集積フィルターとイメージセンサの間には一様な偏光フィルターが挿入され、集積波長板/一様偏光子/イメージセンサの3層構造になる。波長板回転型の偏光センサは、フォトニック結晶波長板を内蔵したものが製品化されている。
これら2種類の偏光センサの機能は異なる。「偏光子回転型」の偏光計測機能は限定的であり、偏光情報の半分を残りの半分と区別がつかないことや、偏光変化に感度が0になる偏光状態があるほか、無偏光成分が混入する環境では、正しい偏光計測は不可能になるなどの欠点を原理的に有する。一方の「波長板回転型」は、あらゆる偏光情報を検出可能で、無偏光成分の混入量も把握できるという強みがあり、あらゆる偏光情報の検出が必要な計測装置には、「波長板回転型」の偏光センサを選ぶ必要がある。これらのセンサの違いは、次章でも紹介する。
次回に続く-
【著者紹介】
井上 喜彦(いのうえ よしひこ)
株式会社フォトニックラティス 取締役
■略歴
1993年3月京都大学工学部金属系学科卒。
1993年4月ソニー株式会社入社。磁性薄膜のプロセス開発、材料開発に従事。
2008年4月株式会社フォトニックラティス入社。フォトニック結晶の作製プロセス開発、応用製品開発及びにそれらの営業・販売に従事。
2010年4月同社取締役就任。マーケティング、営業担当。フォトニック結晶応用製品の一つである複屈折計測装置の市場拡大と機能向上とを実現してきた。近年ではアジア圏を中心とした海外マーケティングにも重点を置いた活動に従事。