
大学院工学研究科 教授
田中 由浩
1.はじめに
触覚が情報化されることの意義は大きい.モノの触感,道具の使用感,着心地,座り心地,触れることを通して得る様々な感覚があり,これらの感覚が数値化されれば,客観的な評価やデザインへの活用はもちろんのこと,その数値を利用した新しいサービスが期待できる.さらに,触覚は運動とも密接であり,身体認識や情動とも関連する.VRやロボット,またそれらを活用した応用技術にも展開が期待される.
ここで,視覚や聴覚と比べると触覚は外部環境と身体との直接の力学的インタラクションを通して得られる感覚であり,より能動的で個々人の身体に依存した感覚といえる.すなわち,対象の物理的な特性だけでなく,皮膚の特性,さらにはどのように触るかの運動の特性も,感覚を左右する重要なパラメータとなる.筆者はこのような触覚の特性を鑑み,「主観的触覚」と呼んでいる.触覚の時空間特性などの基礎的な機械受容器の生理学的知見1)については省略させていただき,本稿では,主観的触覚を扱う上で注目したい皮膚特性や運動特性について,またその情報化の一例や応用展開について,筆者の関連する研究開発事例を中心に紹介したい.
2.皮膚特性と運動特性
2.1 皮膚特性
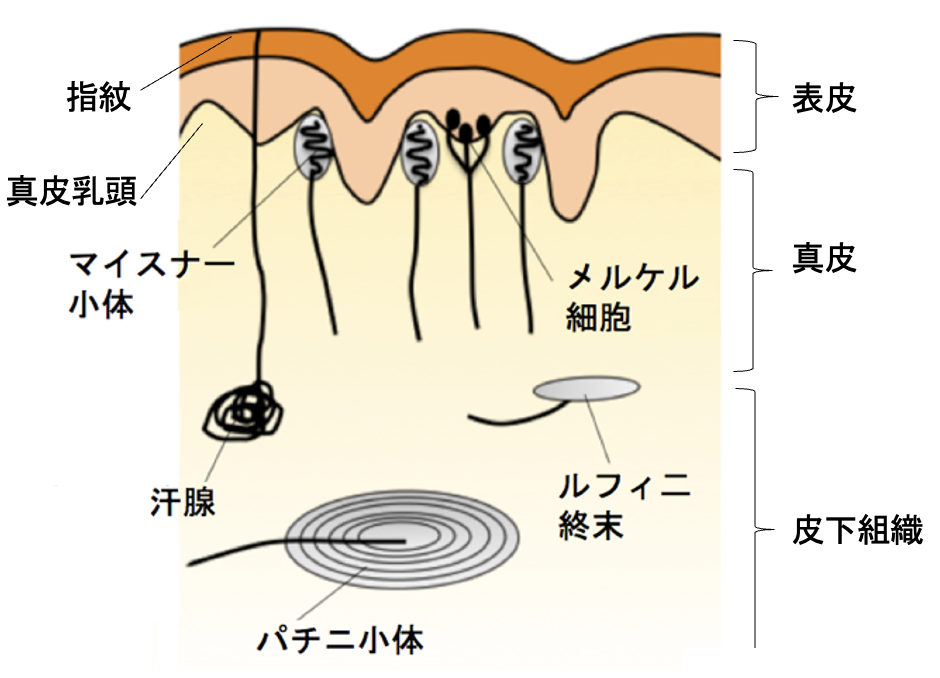
触覚を検知する複数種類の機械受容器は皮膚の内部にあり,図1に示すように皮膚には指紋や真皮乳頭,層構造などの力学的特徴がある1).従って,対象の物性値は皮膚を介して変換され,機械受容器に伝えられている.指紋や真皮乳頭が皮膚への機械刺激を増強して機械受容器に伝える仕組みが実験や有限要素モデルで明らかにされつつある2) 3).
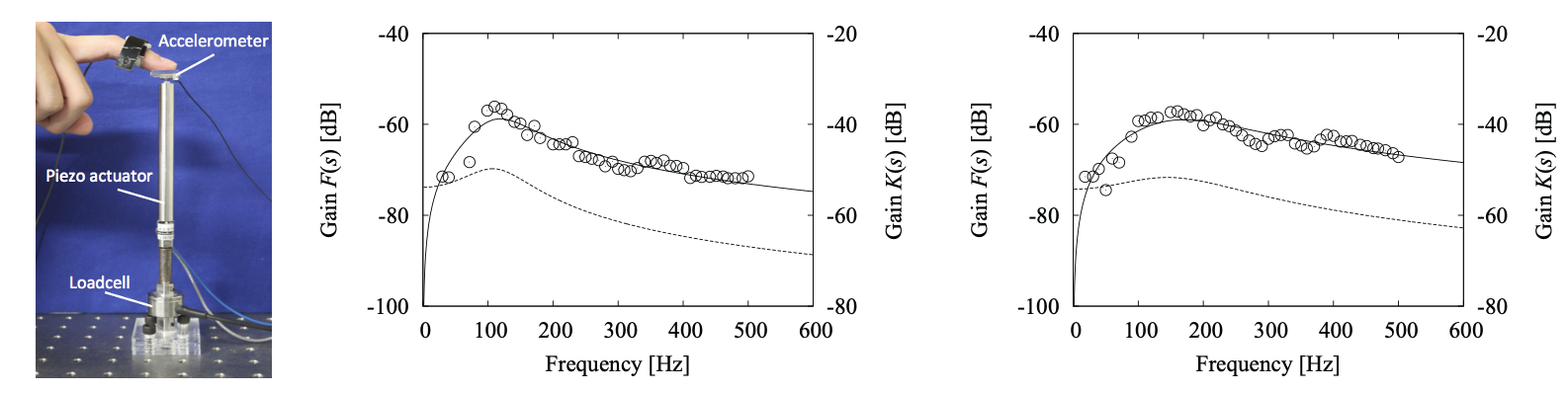
筆者らは皮膚上で発生する伝播振動に着目をしている.対象をなぞった時に直接触った皮膚に振動が生じるが,その振動は皮膚を伝播し触れていない領域にも伝わる4).そしてこのような皮膚振動とテクスチャーや粗さとの対応関係が示されている5)6).そこで,指先にスイープ振動を与え,皮膚を伝播した振動を計測し,皮膚振動の伝達関数を求めた.その結果,100−300Hz付近に共振周波数を有すること,個人差があることを示した(図2)7).また,押付け力によっても伝達関数は変化する8).押付け力の増大とともにゲインおよび共振周波数が上昇する傾向が見られ,特に0.25 Nと0.5 Nの間に有意な差が確認された.押付け力による感覚の変化の観点からは特に,小さな押付け力で対象を触れる場合に,押付け力の変動に注意が必要であることを示唆する.
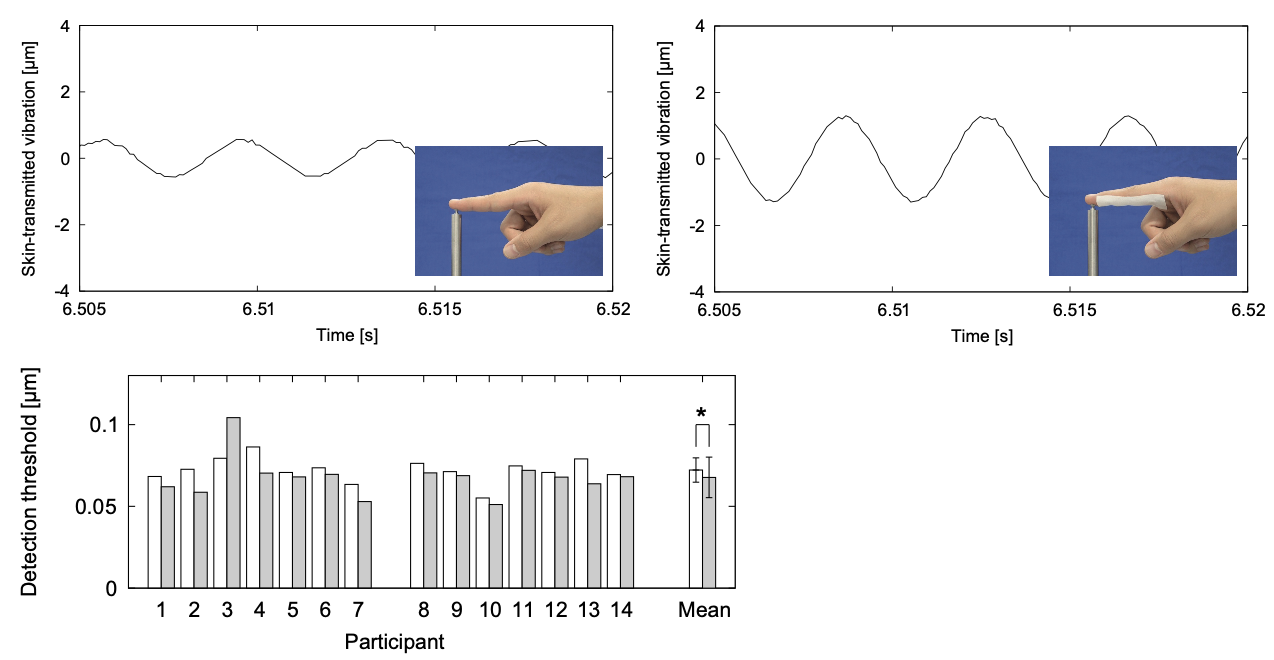
皮膚振動に関連する研究として,テープを指に貼り付けることより指先感度の増強を調べた9)(図3).テープを貼り付けることで,振動が伝播しやすくなり,指先に加えられた振動により皮膚に発生する振動は増大する.この時の指先の触覚感度を計測した結果,250 Hzの振動に対する検出閾値が有意に小さくなることが示された.特に,弁別閾値も減少した被験者については,感度の増強量と皮膚振動の増大量について有意に相関も認められた.人は触れた対象に対し触感を想起するが,実際には自身の皮膚の力学状態を手かがりにしていることを示した結果といえる.
2.2 運動特性
触覚は皮膚特性だけではなく,押付け力によって皮膚特性も変化するように,運動も極めて重要なパラメータとなる.さらに,触覚の受容と運動との間には双方向の関係があり,私たちは対象や目的に応じて,運動を意識的/無意識的に調整している.物体把持では,皮膚表面で生じた局所的な滑りを検知し,適切な力加減で物体を把持することができる.対象の触感の取得においても,なぞり動作での凹凸検出に対する押付け力の差10)や対象の硬さに応じた押付け力の差11)が報告されている.人は必ずしも同じ運動で対象を触るとは限らず,状況に応じて適切に運動を変化させている.
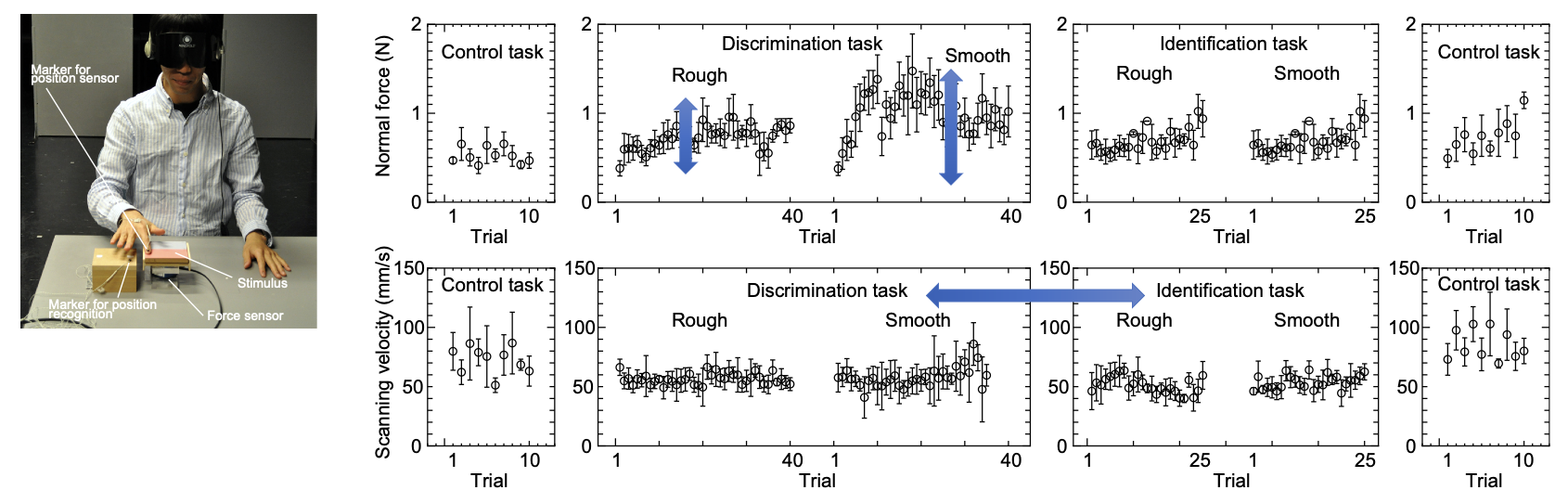
筆者らは,粗い試料群と滑らかな試料群を用意し,さらに,なぞるのみ,弁別課題,識別課題を課した場合について,押付け力およびなぞり速度を計測し,人がどのような運動戦略を持っているかを調査した12)(図4).試料には,番手の異なるサンドペーパーとラッピングフィルムを準備した.実験の結果,目的なく単純になぞった場合には,粗い試料群に対して押付け力,なぞり速度ともに小さくすることが示された.これは,快適性が要因と考えられる.一方,課題がある場合には異なる傾向が見られた.いずれの課題についても,粗い試料群よりも滑らかな試料群について,使用する押付け力の変動が大きいことが示された.滑らかな試料群では,発生する皮膚振動が小さく,より大きな力を使用することで刺激を大きくして課題を達成しやすくする狙いがあると考えられる.また,弁別課題と識別課題では,いずれの試料群についても,弁別課題の方がなぞり速度が速くなった.これは,弁別のために記憶を鮮明にして比較しやすくするためと考えられる.
参考文献
- 岩村吉晃, タッチ<神経心理学コレクション>, 医学書院, (2001).
- 前野隆司、小林一三、山崎信寿, ヒト指腹部構造と触覚受容器位置の力学的関係, 日本機械学会論文集(C編)、63(607), pp. 881-888 (1997).
- J. Scheibert, S. Leurent, A. Prevost, G. Debregeas, The role of fingerprints in the coding of tactile information probed with a biomimetic sensor, Science, 323, pp. 1503-1506(2009).
- Y. Shao, V. Hayward, Y. Visell, Spatial patterns of whole-hand cutaneous vibration, Proceedings of the National Academy of Sciences, 113(15), pp. 4188-4193 (2016).
- S. Bensmaïa, M. Hollins, Pacinian representations of fine surface texture, Perception & Psychophysics, 67(5), pp. 842-854 (2005).
- L. R. Manfredi, H. P. Saal, K. J. Brown, M. C. Zielinski, J. F. Dammann, V. S. Polashock, S. J. Bensmaia, Natural scenes in tactile texture, Journal of Neurophysiology, 111(9), pp. 1792-1802 (2014).
- Y. Tanaka, D. P. Nguyen, T. Fukuda, A. Sano, Wearable skin vibration sensor using a PVDF film, Proceedings of the 2015 IEEE World Haptics Conference, pp. 146-151 (2015).
- Y. Tanaka, T. Yoshida, A. Sano, Practical utility of a wearable skin vibration sensor using a PVDF film, Proceedings of the 2017 IEEE World Haptics Conference, pp. 623-628 (2017).
- Y. Tanaka, Y. Ueda, A. Sano, Effect of skin-transmitted vibration enhancement on vibrotactile perception. Experimental Brain Research, 233, pp. 1721–1731 (2015).
- A. M. Smith, G. Gosselin, B. Houde, Deployment of fingertip forces in tactile exploration, Experimental Brain Research, 147(2), 209-218, (2002).
- L. Kaim, K. Drewing, Exploratory strategies in haptic softness discrimination are tuned to achieve high levels of task performance, IEEE Transaction of Haptics, 4 (4), pp. 242-252 (2011).
- Y. Tanaka, W. M. Bergmann Tiest, A. M. L. Kappers, A. Sano, Contact force and scanning velocity during active roughness perception, PLOS ONE, 9(3), e93363 (2014).
次回に続く-
【著者紹介】
田中 由浩(たなか よしひろ)
名古屋工業大学大学院工学研究科 教授
■略歴
2006 年東北大学大学院工学研究科修了.同年より名古屋工業大学助手,特任助教などを経て,2015 年同准教授,2021年教授,現在に至る.これまでに JSTさきがけ研究者,ユトレヒト大学客員助教,藤田保健衛生大学医学部客員准教授,秋田大学産学連携推進機構客員教授などを兼任.触覚を現象的に捉え知覚メカニズムの解明,およびそれを活用した触覚デバイスの開発と応用研究に取り組んでいる.錯覚や知覚メカニズムに基づく触感デザイン,触覚フィードバックによる感覚運動制御の支援,触覚の共有による人―人/ロボット協調システム,触覚コミュニケーションの研究などに従事.Advanced RoboticsおよびIEEE Transactions on HapticsにおいてAssociate Editorを務める.博士 (工学).