
未来ロボット技術研究センター
富山 健
1. はじめに
近年の日本において長期的に真剣に考えなくてはならないロボットの応用先は介護の現場である.世界に例を見ない急速な超高齢化という現実があり,介護者の確保は危機的な状況になっている.この現実に対してロボットが貢献できる役割は多い.
この背景の元,筆者らは介護の現場へのロボット応用の研究を開始し,「介護者支援ロボット」の概念を提唱した.このロボットの基本的な機能として被介護者の感情状態検出とロボット自体の感情の生成さらにその感情の表出,が設定された.この3つを合わせて擬似感情と定義しているが,この小論ではこれについて述べる.
一方,人間とのコミュニケーションを主たる目的にしたいわゆるソーシャル・ロボットと呼ばれるロボットに関して倫理的側面が近年注目されるようになってきた.擬似感情を持つ介護者支援ロボットも同様のロボットに分類できるため,この点についても考察を加えてみたい.
2. 介護者支援ロボット
よく言われる「介護ロボット」とはどのようなものであろうか.2021年の最近のものでは,センサ類とAIで患者を診ると宣伝されている看護ロボ・グレイス1)に期待を込めて注目している読者もいることと思う.しかし,現場で現実に使用されているいわゆる介護ロボットは実に単純なものに限られている.詳しくは介護ロボットポータルサイト2)に詳しいのでそちらを参照していただきたい.
ここで,私の研究グループのアプローチを紹介する.介護行動には様々なものがあり,人間に向いているもの,例えば会話、やロボットに向いているもの,例えば24時間の見守り,がある.ロボットが得意とする仕事を引き受ければ人間の介護者がより多くの被介護者に対してより良い介護ができるようになり,全体としての介護の質を向上することができる.つまり,ロボットの存在目的は介護者を支援することにあり,そこから介護者支援ロボットという概念が生まれた.
24時間の見守りにおいては,被介護者の物理的な状態の見守りだけでは不十分で喜怒哀楽のような感性的な状態の観測も必要であることが介護の現場でのボランティアや実習を通して明らかとなった*1 .そこで被介護者の物理的な状態の観測と共に感情状態を推定する能力も開発項目に含まれた.同時に,介護者不足から介護者が余裕を持って被介護者と接することは現実的に不可能であり,介護に切れ目が生じてしまうことも明らかである.その切れ目を繋げることが必須であり,それには介護者の「こえかけ」のような被介護者への能動的な働きかけをする能力が必要であるが,ロボットというプラットフォームはこれを可能にする.
*1 排泄介助支援もよく言及されたが,これに関しては研究室OGの宇井吉美氏が起業したaba社が,匂いで排泄を検出するHelppadを開発・販売している。
3. 擬似感情
人間の行動を規定するものとして「知・情・意」が知られている.これらに相当する機能を司っている脳各部も知られるようになってきた.特に最近大きな話題になっているAI,人工知能は人間の大脳皮質(cerebral cortex)のなかでも前頭前野(prefrontal cortex)が司っている機能を模倣している.
一方,特にソーシャル・ロボットと呼ばれるジャンルにおいて「感情を持った」というキャッチフレーズをよく見かける.情に関しては脳科学では感情ではなく情動という言葉がよく使われるが,大脳辺縁系(cerebral limbic system)が担っていることが知られている.この部分の機能をロボットに持たせることによって人間との相性をよくすることが期待されているわけである.しかし,そういったソーシャル・ロボットたちは本当に感情を持っているのであろうか?ロボットが怒っているように見える時果たしてロボットは本当に怒っているのであろうか.あるいは怒っているロボットは必要なのであろうか.私はこれらの設問に対してNOと答える.
知能に関して,研究者たちは人工知能という言葉を使いはっきりと本物の知能ではないことを宣言している.ロボットの振る舞いの中に感情を感じる時,それを感じているのは人間であってロボットは単にそう見せるための振る舞いをしているにすぎない.よって,ロボットが持つのは正確には「擬似感情(Virtual Emotion)」である.本物ではないがあたかも本物のようなという意味で人工ではなく擬似(Virtual)を使っている.3)
擬似感情処理部(広義の擬似感情とも呼ばれる)を含むロボット行動生成機構の概念図を図1に示す.ここには感情検出部,擬似感情生成部,及び感情表出部の3モジュールの関係も示されている.
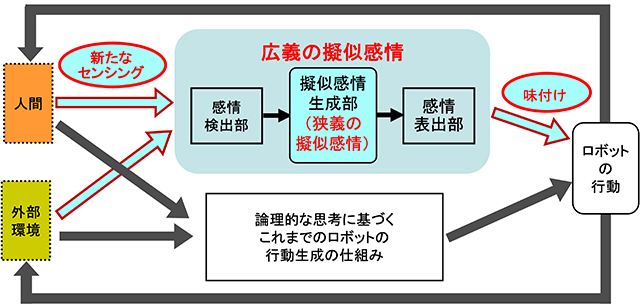
感情検出部の目的はパートナーの感情状態を検出することであり,パートナーの音声,表情,しぐさや環境条件などを入力としている.出力感情にはエクマンの6感情(怒り・嫌悪・恐怖・喜び・悲しみ・驚き)から驚きを除いた5感情に平静を加えた6感情を用いた.驚きの検出は別モジュールで行い,その後の処理も別の経路を用意した4)が,ここでは省略する.
初期の感情検出部にはニューラルネットワーク(NN)などを用い,音声,表情からそれぞれ感情を推定していた.音声,表情,しぐさの3個の入力を統合して感情を検出するために用いた検出部は,それぞれに対応したベイジアンネットワーク(Bayesian Network)を用い,それらを最適化された混合比を使って統合した.5)
図2に示される擬似感情生成部は狭義の擬似感情とも呼ばれるが,パートナーの感情状態と1ステップ前のロボット自身の擬似感情状態のフィードバックを用いて現在のロボットの擬似感情状態を作りだす感情エンジンがその主体をなしている.重要な点はこのフィードバック路を持つことにより過去の情報を使うことになり,擬似感情生成部が記憶を持つ事である.
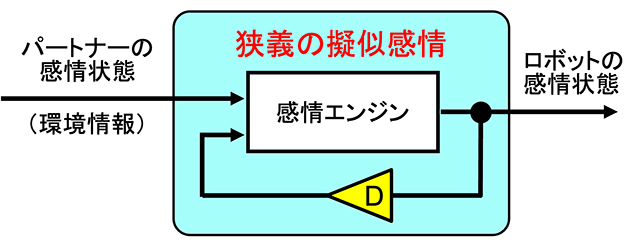
(D)を含むフィードバック路
実際の感情エンジンにはNNや隠れマルコフモデル(HMM)などの他にユニークな構造としてペトリネット(Petri-Net)と遺伝的アルゴリズム(GA)を組み合わせたものを用いた.この構造においてはペトリネット内に複数存在するトランジッションと呼ばれる部分が発火することでネット内を流れるトークンと呼ばれるものを消費・生成し,そのトークンの分布状態を感情に対応させている.
ここで,感情エンジンには適応能力あるいは学習能力が必須の機能であることを述べておきたい.その理由は簡単で,感情の遷移は個人によって千差万別である,ということである.ベテランの介護者は被介護者の感情状態に対して自分の感情状態を合わせることによっていわゆる「馬が合う」関係性を構築している.介護者の不在を補佐する役割を担うためには,ロボットも被介護者とそういった良好な関係性を構築している介護者の感情遷移をなぞる能力が必要である.これを我々研究グループでは「感情遷移の個性化」と呼んでおり,この個性化にはペトリネットとGAを組み合わせた構造が有効であった.ペトリネットの発火状況を戦略的に制御することによって感情の推移パターンを変化させ,個性を持った感情生成を可能とした.6)
参考資料
- Grace robot, https://www.youtube.com/watch?v=ByLiGisgpN0&t=3s
- 介護ロボットポータルサイト,http://robotcare.jp/jp/home/index.php
- Y. Miyaji and K. Tomiyama, “Virtual Emotion for Robots –What, Why, and How–,” Intl. Symp. on Affective Sci. and Engr. (ISASE-MAICS 2018), Proc. A1-2, Spokane, May 2018.
- M. Zenkyo and K. Tomiyama, “Surprise Generator for Virtual KANSEI Based on Human Surprise Characteristics,” Proc. (CD), 14th Intl. Conf. on Human – Computer Interaction (HCI2011), Florida, July 2011.
- K. Kamijo and K. Tomiyama, “Emotion Estimation Based on Facial Image, Voice Sound and Body Motion,” Intl. Assoc. of Societies of Design Research (IASDR2013), 01D-4 (Paper number 1678-1), Tokyo, August 2013.
- Y. Miyaji and K. Tomiyama, “Construction of Virtual KANSEI by Petri-net with GA and Method of Constructing Personality,” Proc., 12th IEEE Workshop on Robot and Human Interactive Communication (RO-MAN2003), pp. 6B4(CD-ROM), 2003.
次回に続く-
【著者紹介】
富山 健(とみやま けん)
千葉工業大学 未来ロボティクス学科 教授
未来ロボット技術研究センター(fuRo)研究員
■略歴
1971年 東京工業大学 制御工学科 学士
1973, 77年 カリフォルニア大学・ロサンゼルス校
システムサイエンス学科 修士(M.S.),同 博士(Ph.D.)
1978~1983年 テキサス大学・エルパソ校 電気工学科 助教授
1983~1988年 ペンシルバニア州立大学 電気工学科 助教授
1988~2000年 青山学院大学機械工学科 助教授,のち教授
2000~2006年 青山学院大学情報テクノロジー学科 教授
2006~2014年 千葉工業大学未来ロボティクス学科 教授
2014年~ 現職
主な研究分野は介護者支援ロボット,ロボットの擬似感性,並びにロボットの倫理.英語による学術論文発表指導を日本機械学会及び日本感性工学会を含む様々な団体にて実施.YouTubeチャンネル「CIT Quality Education」で英語による講義「数学基礎」シリーズ担当.
活動の主体を表すキーワード:ロボット、介護、教育、プレゼンテーション指導
■著書・連載
理系科学英語 徹底トレーニング [ロボット工学],(監修),アルク
私の修行時代,「修行時代の出会いを生かす」,(分担),弘文堂
いざ国際舞台へ! 理工系英語論文と口頭発表の実際,(共著),コロナ社
国際舞台で“結果を出す” テクニカルイングリッシュの心得第1回〜12回,日本機械学会誌 2018年,Vol.121, No. 1190~1201連載
“Virtual Emotion for Robot – Towards Human Support Robot,” Uehiro-Carnegie-Oxford Conference: Ethics and the Future of Artificial Intelligence, 2018.