1 自動運転技術への取り組みが活発化
最近,各種の自動走行移動サービスの実現に向け,米国をはじめとして,自動運転に関する技術開発が世界各国で目覚ましく活発化している。Google社が自動運転機能を乗用車(トヨタ・プリウス)に搭載して初めて高速道路を走行したのは2009年であるが1),その後に同社は,着々と技術蓄積を進め,2016年10月末には,自動運転モードでの公道での走行距離が2.23 百万マイル(約3.6百万km)に達した2)。同社が現在公道で走行させている自動運転機能搭載車は,レクサスRX450h SUV24台及びプロトタイプ車34台である。
またTesla 社は,2016年10月19日,同社が販売する全車両への自動運転機能の搭載を同日から実施すると発表した3)。また,Uber 社は,2016年9月14日,米国ペンシルバニア州ピッツバーグで,選ばれた顧客向けに「自動運転車」の配車サービスを開始した4)。ドイツでは,Audi 社が2017年中に自動運転機能を搭載したA8 を発売する予定である5)。日本では,2020年の東京オリンピック・パラリンピックに向け,自動走行システム実用化の加速を図るべく,戦略的イノベーション創造プログラム(SIP)「自動走行システム」の一環として,2017年9月頃から2019年3月にわたり,「自動走行システム」の大規模実証実験を実施することが,内閣府から2016年11月15日に発表された6)。
NHTSA(米国運輸省・道路交通安全局)は,自動運転車の開発と普及による交通安全の加速を図るべく,メーカーが自社製品を公道で走行させる前に満たす必要のある15項目の基準を盛り込んだ自動運転車に関する指針7)を,2016年9月20日に正式に発表した。NHTSAは,加速・操舵・制御及び運転環境の監視などを,ドライバーとシステムのいずれが行うのかという観点などから,これまで自動制御システムをレベル1からレベル4までの4段階で区分していたが,2016年9月に発表された上記の指針では,SAE(自動車技術者協会)が策定したレベル5までの5段階の区分を採用した。なお,SAEによる自動運転車に関するガイドの初版の発行年月は2014年1月であるが,2016年9月にはその改訂版8)が発行された。
| 運転環境の監視 | 自動運転レベル | 名称 | 定義の概要 |
|---|---|---|---|
| ドライバー | 0 | 手動運転 | 注意喚起のサポートはあるが,ドライバーがすべて運転操作 |
| ドライバー | 1 | 運転支援 | 加速・操舵・制御のいずれかをシステムが行う状態 |
| ドライバー | 2 | 部分的自動運転 | 加速・操舵・制御のうち複数をシステムが行う状態 |
| システム | 3 | 条件付き自動運転 | すべての運転操作をシステムが行うが, システムが介入を要請したときはユーザーの適切な対応が必要な状態 |
| システム | 4 | 高度な自動運転 | システムがユーザーに介入を要請したときに, ユーザーが適切に対応できなくても, システムが対応してすべての運転操作を行う状態 |
| システム | 5 | 完全自動運転 | システムがすべての運転操作を行う状態 |
2 自動運転レベルの分類と自動運転に必要と想定されるセンサーの市場予測
表1 に,SAEによる自動運転レベルの分類の概要を示す。詳しくは,原資料8)を参照されたい。これによれば,レベル2まではドライバー側に運転環境監視の責任がある。レベル2のシステムは,部分的自動運転システムであって自動運転システムの範疇には含まれない。レベル3 からは運転環境監視の責任がシステム側にある自動運転システムとなるが,緊急時への対応などに応じていくつかのレベルが分かれている。自動運転という場合には,どのレベルに相当するのかによってユーザーに必要な対応などが異なるので注意が必要である。
自動運転レベルに応じて,必要となるセンサーモジュールの種類及び個数は異なる。また,自動運転システムを開発しているメーカーごとに,システムの設計思想が異なっているため,必要となるセンサーの種類及び個数も異なる。例えば,Ford 社の自動運転用テスト車には,レ-ダーやカメラのほかに4 台のLiDARが搭載されている9)が,Tesla社が市販している自動運転機能搭載車には,多数のレーダーやカメラは搭載されているものの,LiDARを搭載する予定は現在のところないらしい10)。自動運転レベルに必要と推定されるセンサーモジュールの種類並びに個数に関するYOLE Development 社による市場予測の一例を表2に示す11)。なお,センサー技術は日進月歩であり,またセンサーのコストダウン率はセンサーごとに異なるので,将来に必要となるセンサーの種類及び個数は,現在想定されているものと大幅に異なる可能性があるので,この点留意する必要がある。
| センサーの種類 | レベル1 | レベル2 | レベル3 | レベル4 | レベル5 |
|---|---|---|---|---|---|
| 超音波 | 4 | 8 | 10 | 10 | 10 |
| 長距離用レーダー | 1 | 1 | 2 | 2 | 2 |
| 近距離用レーダー | 1 | 4 | 6 | 6 | 6 |
| 長距離用カメラ | 2 | 2 | 4 | ||
| 周辺用カメラ | 4 | 5 | 5 | 5 | |
| 立体カメラ | 1 | 1 | 2 | ||
| マイクロボロメーター | 1 | 1 | 1 | ||
| ライダー(LiDAR) | 1 | 1 | 1 | ||
| 自律航法センサー | 1 | 1 | 1 | ||
| 合計 | 6 | 17 | 29 | 29 | 32 |
Goldman Sachs社は,運転支援及び自動運転機能に係わる各種の構成要素に関する2015年から2050年にかけての長期にわたる詳しい市場予測を報告している12)。これによれば,運転支援及び自動運転機能に関する市場規模は,2015 年は約28.9 億ドルであるが,2020年,2030年,2040年及び2050年には, それぞれ約275億ドル, 約1,970 億ドル,約3,130 億ドル及び約3,120億ドルになると推定されている。運転支援及び自動運転機能に係わる各種構成要素のうち,カメラ,レーダー及びLiDARに関する市場規模の予測値を抜き出し,図1にそれらの推移をグラフにして示す。これによれば,LiDARの普及はレーダーよりも数年遅れるが,2035 年以降のLiDARの市場規模は,レーダーのそれよりもかなり大きい。
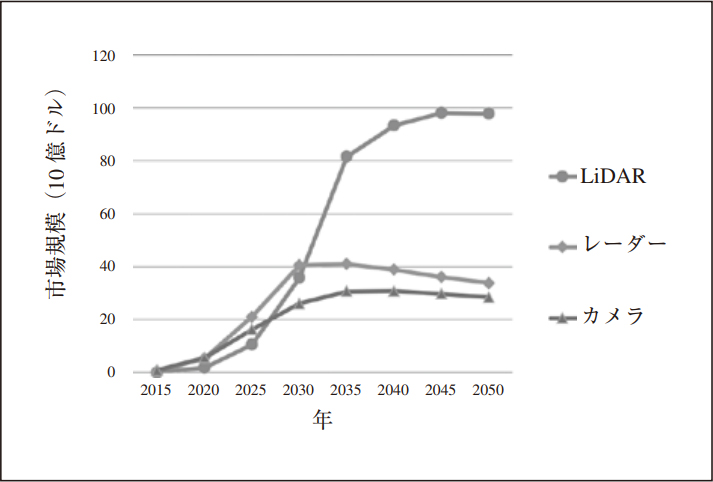
レーダーは,レベル2のシステムでも大きなニーズあると想定されているのに対して,LiDARはレベル3以降のシステムでないとニーズがあまり大きくならないと想定されている。このためLiDARの普及はレーダーよりも遅れるが,LiDARの単価がレーダーの単価よりも一般に高価であるため,自動運転レベルの高いシステムが普及するようになる2030 年頃になると,LiDARの市場規模が急増するものと考えられる。
表3 に,各種センサーの機能・性能を相互比較した例を示す13)。各種センサーにはそれぞれ一長一短があるので,これら各種センサーを組み合わせてセンサーフュージョンを行うことにより,センサー単独では足りなかった機能・性能を補うことができ,自動運転に最適なシステムを構築できる。
| 機能・性能 | LiDAR | レーダー | 可視カメラ | 超音波 |
|---|---|---|---|---|
| 近傍の物体検知 | 2 | 4 | 2 | 5 |
| 測定距離 | 4 | 4 | 5 | 1 |
| 分解能 | 4 | 3 | 5 | 2 |
| 暗い場所での動作 | 5 | 5 | 1 | 5 |
| 明るい場所での動作 | 5 | 5 | 4 | 5 |
| 雪・霧・雨の際の動作 | 3 | 5 | 2 | 5 |
| 色彩/コントラスト | 1 | 1 | 5 | 1 |
| 検出速度 | 4 | 5 | 2 | 1 |
| センサーの寸法 | 1 | 5 | 5 | 5 |
| 価格 | 1 | 5 | 5 | 5 |