鹿島建設(株)は、トヨタ自動車(株)、(株)NIPPO、東京都市大学、カリフォルニア大学バークレー校と共同で将来の新たなモビリティサービスの提供や自動運転社会の到来を見据え、センシング機能を有する道路、スマートロード※の開発に着手した。このたび、同社の技術研究所(東京都調布市)敷地内に光ファイバセンサを埋め込んだ試験舗装フィールドを構築し、道路上の歩行者や自転車などの移動体の位置を、同センサで検知したデータにより自動追跡できることを確認した。
※スマートロード:ICT・DXによって、安全・安心な通行確保、効率的な交通管制など高度利用が実現された道路
開発の背景
近年の多様化するモビリティサービスを受け、交通事故の撲滅など安全な社会の実現に向けたカメラやLiDAR※などの活用が進められている。しかし、これら先行技術には、雨や霧などの天候による影響、プライバシーの保護、物陰に隠れた移動体への対応などの課題がある。光ファイバセンサはこれらの技術課題を解決でき、安全性を高められるだけでなく、圧倒的に広い範囲を面的にセンシングできるためコスト低減効果もある。
今回、構造解析技術やデータ処理技術を有する東京都市大学関屋准教授とカリフォルニア大学バークレー校曽我教授、モビリティ技術を有するトヨタ自動車、舗装技術を有するNIPPOの研究チームに、同センサによるインフラ構造物の計測・評価技術を有する鹿島が加わり、新時代のモビリティに対応できるスマートロードの開発に向けた研究体制を構築した。
※LiDAR:レーザー光を照射して、その反射光の情報をもとに対象物までの距離や対象物の形などを計測する技術
技術の概要
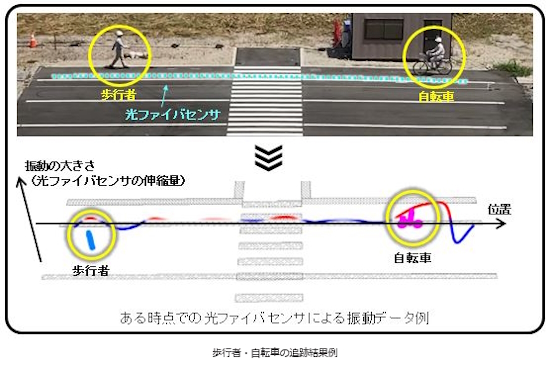
光ファイバセンサは、30km以上にも及ぶ距離にわたって、どこに振動やひずみ(伸縮)が発生しているか、その位置と大きさを捉えることができる。今回、幅10m、長さ20mの本試験フィールドにおいて、5本の同センサを、それぞれ異なる深さに埋め込んだ。道路に埋め込まれた同センサには、道路上を移動する歩行者や車両から生じたわずかな振動が伝わるため、振動の伝播状況を詳細に把握できる。2022年4月から1年間、外気温など環境条件が変化するなかでデータを蓄積し、同センサで検知した歩行者や自転車からの振動データを解析した結果、その位置や進行方向を自動で追跡できることを確認した。
このことから、本技術を発展させることにより、見通しの悪い交差点や悪天候下においても歩行者や車両などをあらかじめ認識する安全性の高いモビリティサービスの構築が可能となり、自動運転社会の実現に貢献することが期待できるという。
現在、共同研究先と連携しながら、同フィールドを活用し、歩行者や自転車の振動データのパターンの解析にAI技術を活用するなどして、複数の異なる移動体の識別や追跡技術を開発している。さらに、深さによって異なる振動データを利用して、移動体から同センサへの振動伝播を解析する技術を構築し、最適な同センサの配置や本数などの計画、ならびにセンシングに適した舗装に関する技術の検討も進めている。
今後の展開
鹿島は、橋梁やトンネルなどのインフラへの光ファイバセンサの適用を通じて、構造物に生じる変形などの状況の評価、利用状況の把握、センシングデータに基づく利用者へのリアルタイムなサービス提供、といったインフラの新たな価値の創出を目指している。
今回の取組みにおいても、道路に埋め込まれた同センサを活用し、舗装や地盤などの構造を評価するだけでなく、より安全なモビリティサービスを提供できる道路インフラとしてスマートロードの開発を進めていくとしている。
ニュースリリースサイト(kajima):https://www.kajima.co.jp/news/press/202310/10c1-j.htm