(株)大林組と、日本電気(株)は、共同開発した「バックホウ自律運転システム」を改良し、各種センサやカメラをバックホウに設置することにより、屋内外を問わず多様な建設現場へ適用範囲を拡大した。
2社は、2019年のバックホウ自律運転システムの開発以降、建設現場での利用拡大に向けて共創活動を続けてきた。従来のシステムでは、トンネル工事現場などバックホウの作業場所が固定化された建設現場を対象とし、バックホウの動きや盛土の掘削・積み込みポイントを算出するための各種センサやカメラをトンネルの天井などに固定していた。
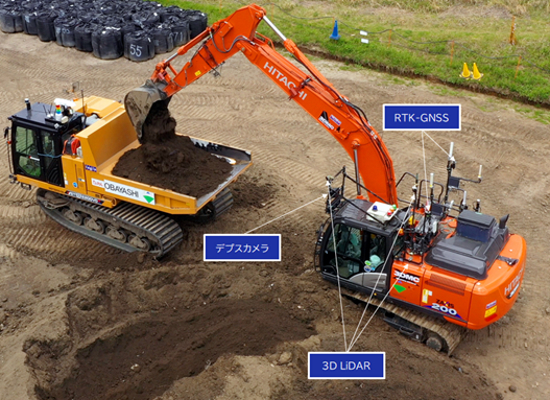
今回、センサやカメラの認識機能を高度化し、バックホウに設置することで、屋内外を問わず状況が変化する多様な現場環境においても、従来と同様の精度で自律運転が可能となった。さらに、地表面以下を掘らない掘削や土砂の清掃、盛土の積み替え等ができる制御機能の向上や、外部接続機能(連携インターフェース)の追加により、複数台の建設機械が連動して協調運転するよう制御する建機フリートマネジメントシステム(建設FMS)を通じて、他の自動化・自律化重機と連携させた作業ができるという。
本システムは、大林組が実施した福島県飯舘村における建設機械の自動・自律運転の現場実証(※1)にて適用した。
■システムの特長
1.現場環境と工種の適用範囲が拡大
従来はトンネルの天井など高所に固定されていた各種センサやカメラをバックホウに設置したことにより、移動をしても姿勢・位置や周辺環境から、掘削ポイントや積み込みポイントを正確に判断できるため、多様な現場環境への適用を可能にした。また、NECの適応予測制御技術(※2)を活用することで、地表面の土砂のみを対象とした掘削制御技術を開発。これにより、盛土工事や造成工事における土砂の積み込み作業の自律化を実現した。
2.工事作業における省力化の拡大
従来はあらかじめ堆積された土砂の積み下ろしだけに対応していたが、任意の地点に運搬され積み下ろされた土砂の積み替え作業や、積み下ろし場所の清掃作業を自律化する制御技術を今回開発した。これにより、自律運転で行える作業内容が増えるため、現場労働者の作業の負荷軽減・省力化を実現した。
3.施工管理システムとの連携の実現
自律運転を外部からの指示によって実行し、他の自動化・自律化重機と連携するために、建設FMSなどの管理システムとの連携インターフェースを開発しました。バックホウの制御と並行して建設FMSからの指示を処理できるため、自律運転を妨げることなく他の重機との連携が可能である。
※1 福島県飯舘村における建設機械の自動・自律運転の現場実証
https://www.obayashi.co.jp/news/detail/news20220422_1.html
※2 適応予測制御技術
制御対象の動特性の変化に適応する「適応制御」と、制御対象の動きを予測することで応答遅延に対応する「予測制御」を融合したNEC独自の制御技術
ニュースリリースサイト:https://prtimes.jp/main/html/rd/p/000000213.000078149.html