
機械システム工学科
教授
武村 史朗
1. 研究室の概要
沖縄高専は「人々に信頼され,開拓精神あふれる技術者の育成により,社会の発展に寄与する」を理念として2004年に一期生を受け入れ,国立高専では最も若い高専である.筆者はレスキューロボットの研究開発に携わった経験の後,2007年に沖縄高専 機械システム工学科に赴任しました.海に囲まれた沖縄でする研究は海に関すること,海洋保全に貢献できるようなこと,沖縄に貢献できるようなこと,を念頭におき,水中ロボットに関する研究開発をはじめとするロボティクスに関する研究を行っている.
2. 研究内容・テーマ・実績
沖縄は海で囲まれています.筆者が赴任した当初はサンゴの白化現象の原因の一つにオニヒトデによる食害が挙げられる.そこで,沖縄近海における海洋保全・情報収集のための水中ロボットの研究開発を行っている.ここでは,筆者らが行っている水中ロボットに関する研究開発を紹介する.
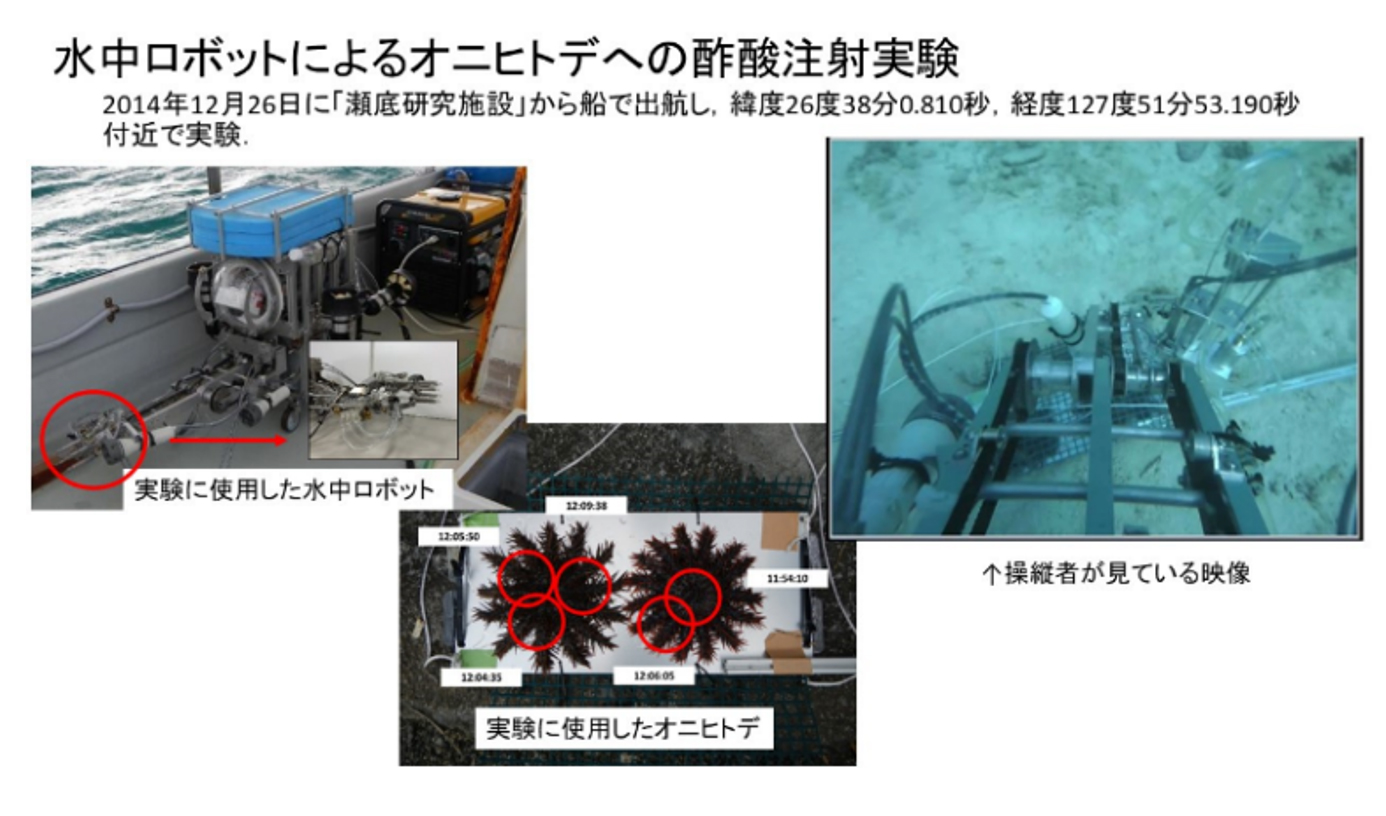
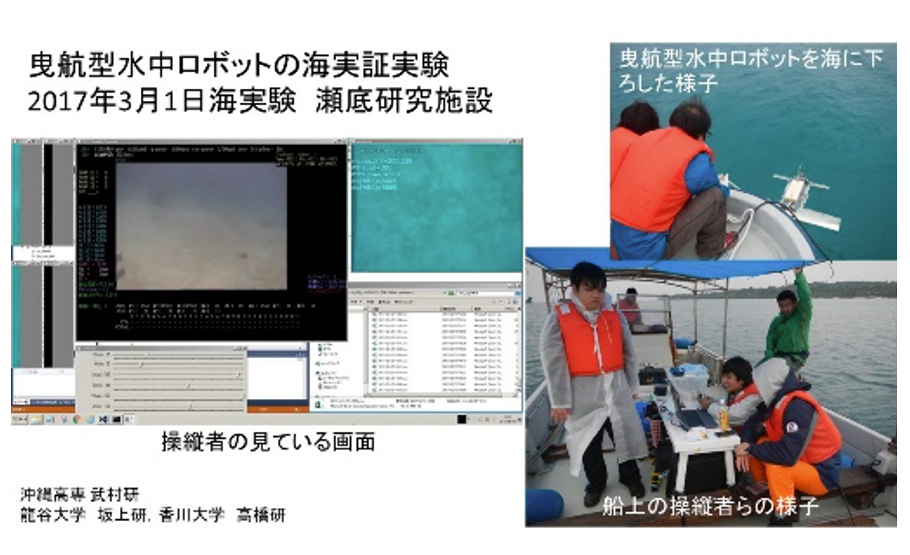
2.1 水中ロボットによるオニヒトデへの酢酸注射実験
サンゴの食害に対して,オニヒトデへの酢酸注射による駆除の仕方がある.ダイバーでの駆除は肉体的負担・安全性(オニヒトデは毒を持っているためアナフィラキシーショックを引き起こす場合があります)をダイバーが担う.肉体的負担・安全性を水中ロボットに担うことを目的として,酢酸注射を遠隔操縦の水中ロボットで行うことを試みた.操縦者は海上のボートで水中ロボットから送られる映像をラップトップパソコンで見ながら水中ロボットを操縦した.カメラ映像での操縦は,操縦者にかなりの負担となる.この実験では,水中ロボットでオニヒトデへ酢酸注射できることを確認した(図2-1参照).しかしながら,オニヒトデを探す・追いかける・酢酸注射を打つ,をすべて遠隔操縦で人が行うのは大変である.これらの作業をAI技術等により,自律的に作業できる自動化が求められる.この実験では,ダイバーによるオニヒトデ駆除ではなく,遠隔操作による水中ロボットの駆除の可能性を示すことができた.
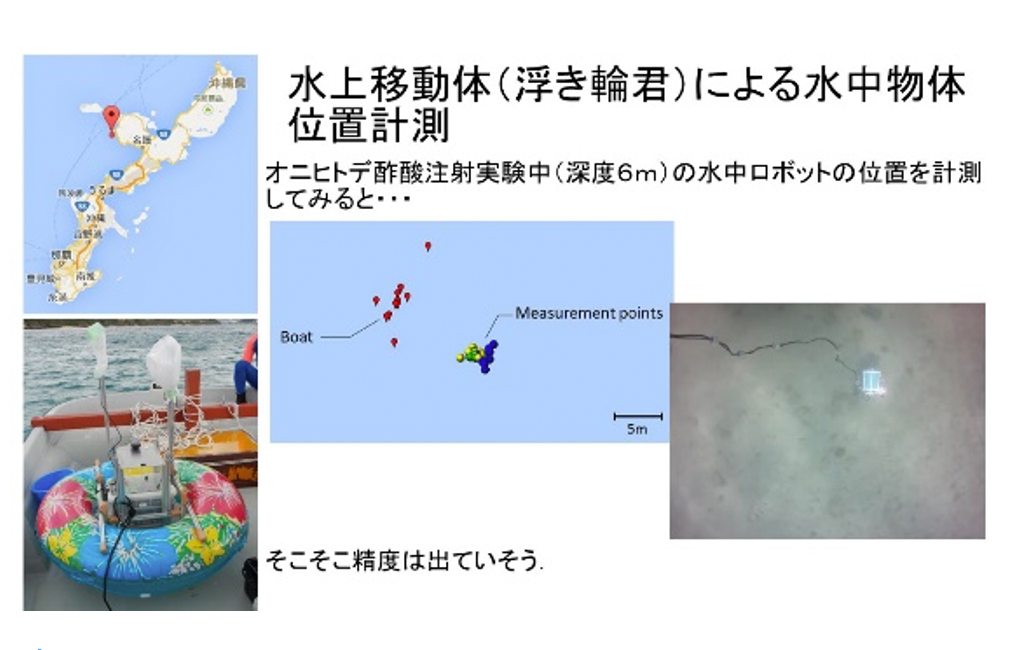
2.2 水上移動体の水中物体位置計測
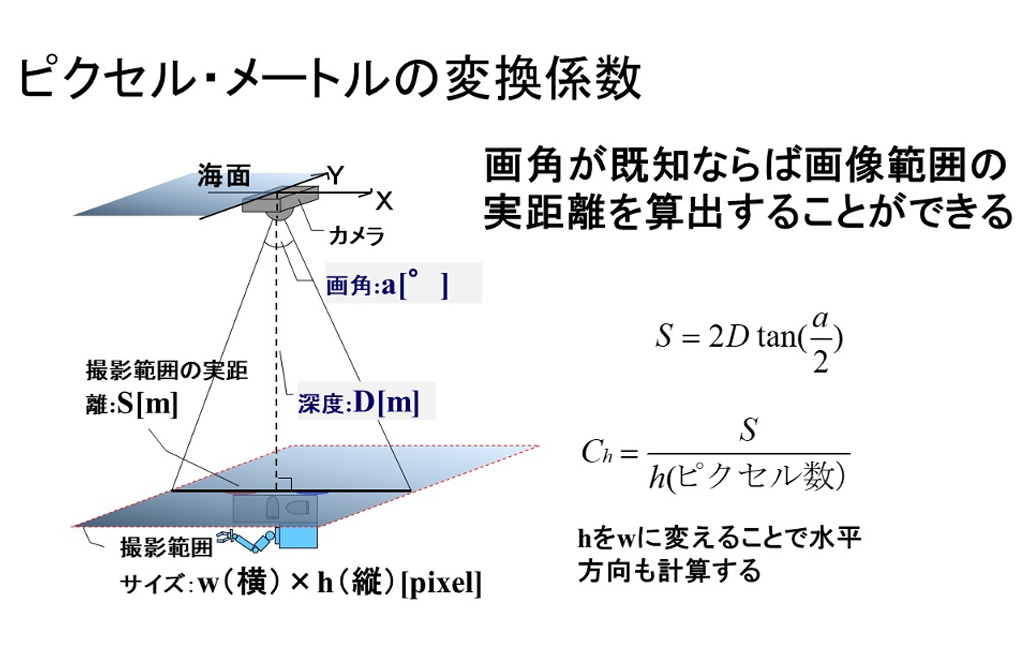
水中調査の際には,水中の位置は重要な情報になるが,水中では電波が届かないので,地上のようにGPSが使えず,位置情報はわからない.しかし,沖縄近海は透明度が高く,深度5mほどの海底は海面からくっきり見ることができる(図2-2-1の右側の写真)ことから,深度情報がわかれば,水中の位置が計測できる(図2-2-2参照).筆者らは,水中ロボットにLEDライトを上向きにつけ,水中ロボットから深度情報を取得し,水上移動体にGPS,下向きカメラ,姿勢センサを搭載することで,水中ロボットの水中での位置計測をできるようにした.図2-2-1はオニヒトデに酢酸注射する実験の際の位置計測を行ったものである.
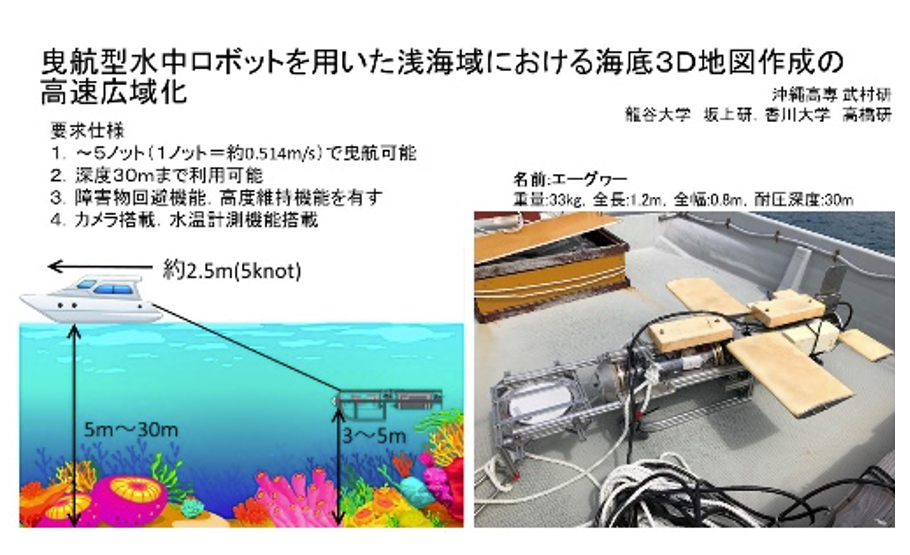
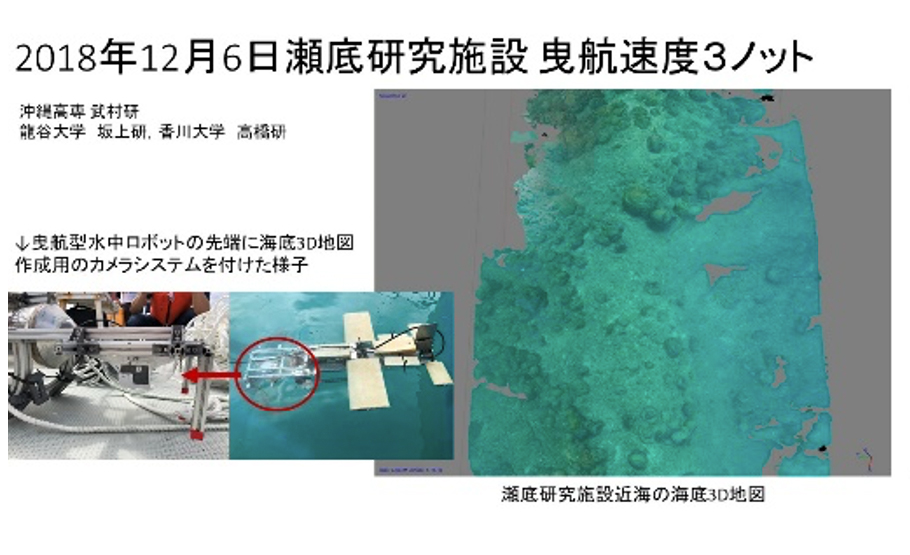
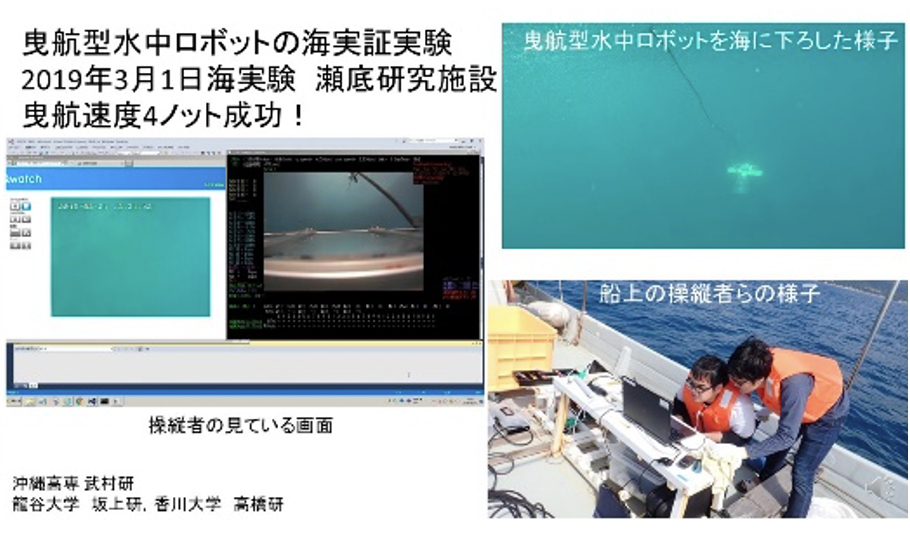
2.3 曳航型水中ロボットを用いた海底3D地図の作成(共同研究 龍谷大 坂上研,香川大 高橋研)
従来,AUV(自律型無人水中ロボット)を用いた海底3D地図作成は行なわれている.従来の方法だと3ノットまでが多いが,我々は,曳航型水中ロボットを用いて,浅海域における広域・高速に海底3D地図作成のための曳航型水中ロボットの開発・カメラシステムの開発を行なっている(図2-3-1,2,3参照).2019年3月1日曳航速度4ノットに成功した(図2-3-4参照).この技術が実用化できると定期的(1年に一回,またはさらなる高頻度)に同じ海域を撮影することで海底の経年変化の蓄積ができ,それを元にした海洋保全計画の作成,海洋考古学における海底ミュージアムなどの用途への応用が期待できる.同じようなことを従来の手法でするとダイバーが実際に潜水して行うことになるので,高コストかつ事故のリスクがある.ロボティクス技術を活用することで,人の安全も確保でき,海洋情報の活用方法が広がる.
3. 今後の方向性・展望
今回は,本研究室で主に研究開発をしている水中ロボットに関することを述べた.研究室の学生は毎年変動があるが,本科5年生,専攻科1・2年生で計5~10名程度で研究開発を行っている.本科生・専攻科生は学内外での研究成果を発表して,自身の発信力を身に着けている.また,本校の専門4学科の学生が集うロボット製作委員会では,毎年,高専ロボコン出場を目的としてロボット製作を行い,大会後は県内でロボット作りの楽しさを伝える活動を続けている.これらの研究活動・課外活動により,プロジェクトの経験・プレゼンを含むコミュニケーションの経験を得て,ロボット製作・制御の楽しさや奥深さを感じてもらい,地域貢献につながる学生教育を進めて行きたい.
【著者紹介】
武村 史朗(たけむら ふみあき)
沖縄工業高等専門学校 機械システム工学科 教授,ロボット製作委員会顧問
Fumiaki TAKEMURA, Dr. Eng., Professor
Department of Mechanical System Engineering, National Institute of Technology, Okinawa College
■略歴
- 2007年4月沖縄工業高等専門学校 機械システム工学科 准教授
- 2018年4月
(現在に至る)沖縄工業高等専門学校 機械システム工学科 教授
水中ロボット,ロボティクスに関する研究に従事
社会に役に立つ水中ロボット技術の開発 九州工業大学 西田研究室

大学院生命体工学研究科
准教授
西田 祐也
1.研究室の概要
九州工業大学の西田研究室では「高知能フィールドロボットの創出と社会実装」というテーマのもと,ただ水中で動作するのではなく,社会やユーザに貢献できるデータが取得可能な水中ロボットやセンサの開発を行っている.最近では手振れ機能がついた防水カメラや高性能な運動制御が実装された水中ドローンなどが普及し,それらを使った調査が積極的に行われている.しかし,海は場所や時間によって環境が大きく変化するため,一般的に普及している水中機器では変化に対応できず,有用なデータが取れない場面が数多くある.本研究室では,水や海に携わる事業者や自治体からのニーズをもとに,実環境に適応した実用的な水中機器やAIなどの最新の技術を取り組んだ機器,効率的なデータ処理手法の開発に取り組んでいる.
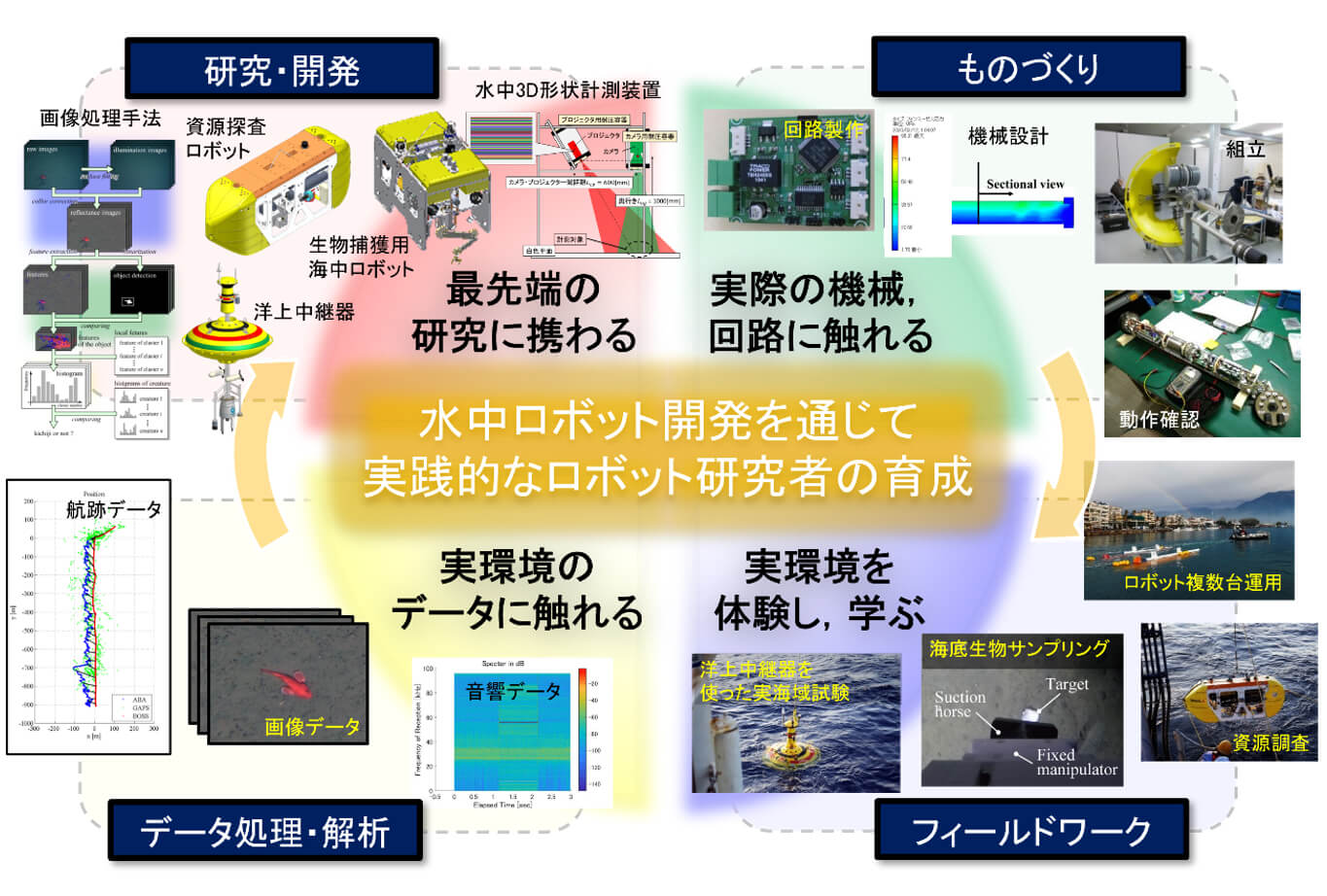
社会に多くの実用的な水中ロボットを普及させるには,水中機器の開発や運用に携わる高度人材を育成し,水中ロボット業界を盛り上げていく必要があると考えている.実践的な水中ロボット研究者(技術者)の育成を目指し,本研究室では水中ロボット開発を通じて「研究・開発」,「ものづくり」,「フィールドワーク」,「データ処理・解析」の4つを一様に学べる教育プログラムを提供している(図1参照).実用的な水中ロボットを製作するにはそれを実際に動かす環境を知る必要があり,実環境を知ることで現場に則したデータ処理や解析が可能となる.また,実環境のデータに触れることで新しい発想や研究が踏まれ,その知見によって最先端の水中機器を作れるようになると考えられる.
2.研究内容・実績
2.1.養殖魚の餌食いつき度判定のためのセンサシステム
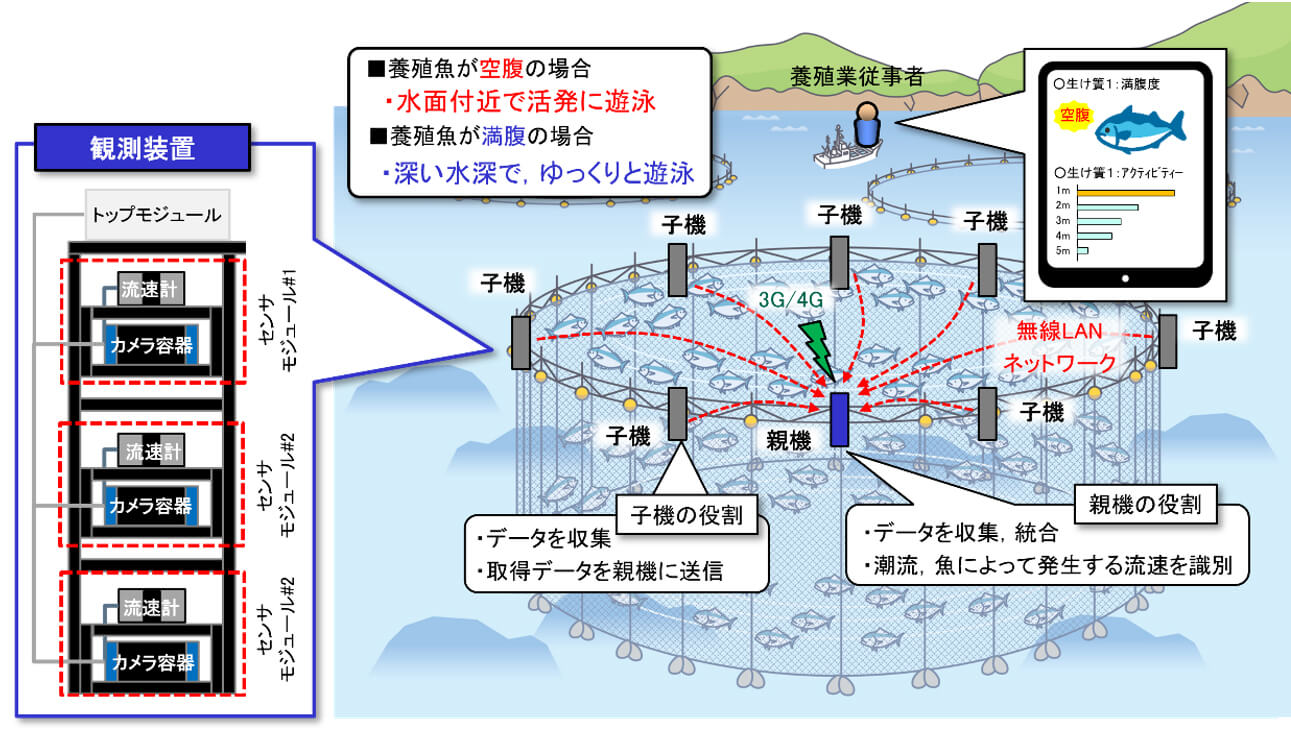
水産資源の減少に伴い,安定的に魚介類を市場に流通できる養殖業の強化が世界的に望まれているが,日本の養殖業は停滞している.その主な要因の一つとして,養殖魚への給餌の問題が挙げられる.給餌する餌の量はコスト面から必要最低限に留めたいが,給餌量が不十分だと養殖魚の発育が悪くなり漁労収入が低下する.漁労所得をあげるため適量の餌を給餌する必要があるが,養殖魚の空腹状態を見極めるのに熟練した技術を要する.効率的な給餌を実現するため,水中カメラで取得した画像をもとにしたAIによって餌の食いつきを判定させる技術が開発され,すでに複数の養殖業者に導入された実績がある.しかし,水中カメラで撮影できる範囲は生け簀の大きさと比較するとかなり小さく,水の濁りや天候,時間によって魚を撮影できないので,画像ベースのAIでは運用が限定されるという問題がある.一方で筆者らが行った事前調査において,養殖生け簀内にいる空腹状態の魚は水面付近に集まり活発に遊泳し,満腹になると安全な深い水深でゆっくりと遊泳するという仮説が得られた.この仮説がただしく,遊泳の速度や水深から生け簀内の魚の食いつき度を判定することができれば,水の濁りや天候に影響されない画期的なシステムを実現できると考えらる.そこで,本研究では図2で示すような養殖魚の餌食いつき度を計測するシステムを開発した.本システムには,各水深に配置された流速センサモジュールとデータを送信するためのトップモジュールで構成される観測装置が用いられる.各深度に配置された流速センサで魚の遊泳によって発生した流速を計測し,そのデータから活発に遊泳している魚の水深帯を特定することで餌の食いつき度が判定できると考えられる.
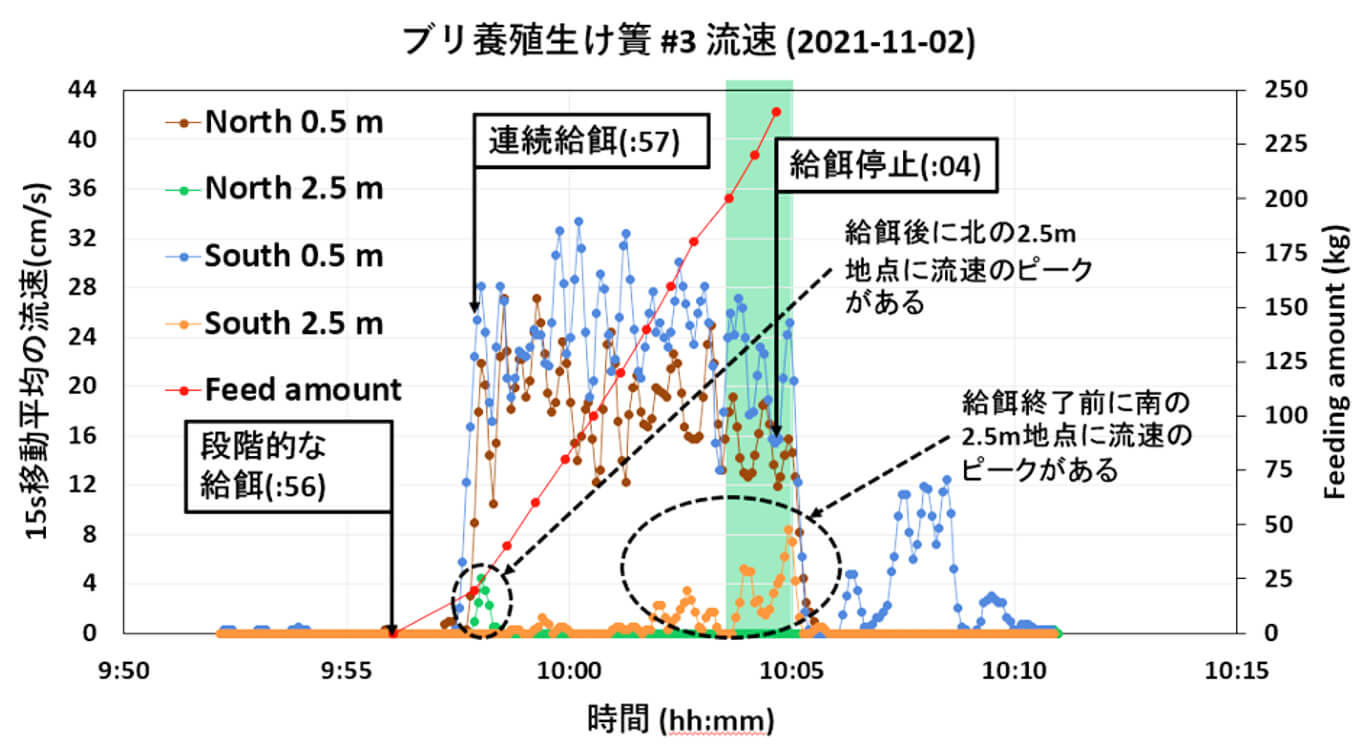
開発したシステムを用いて,2022年11月1日~3日に長崎県の株式会社徳丸水産の養殖場で養殖魚の遊泳によって発生する流速の計測を3回行った.図3に0.5歳のブリが8000匹ほど入った養殖生け簀に開発した2基の観測装置を取り付け,給餌中の流速を計測した結果を示す.給餌開始直後は全てのセンサは低い値を示していたが,連続給仕に切り替えてから北と南ともに表層の流速が平均20cm/s以上まで上昇し,給餌停止するまで平均値がゆるやかに減少していた.給餌停止する3分前くらいから,南の2.5m深度の流速センサの値が増え,最大で8cm/sまで上昇していた.この2つの事実から,ほとんどの魚は餌を食べるため表層に集まり活発に遊泳していたが,養殖生け簀内のブリの一部は10:00~10:02ごろ餌を食べることに満足し,少しずつ表層から深層に移動していたと考えられる.以上の結果から,本システムで得られる流速を用いることで給餌中の生け簀内の魚が活発に遊泳している深度帯や魚の鉛直方向の移動を把握することができると言える.
2.2.ケーブル拘束型水中ロボットを用いた長期海底観測装置
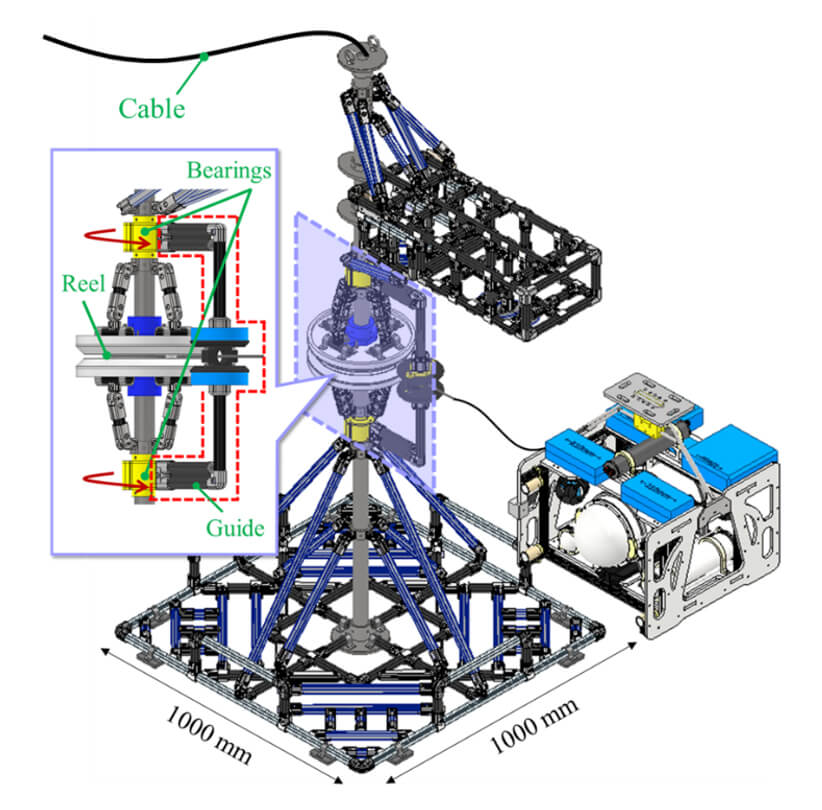
世界的に海中工学の技術が向上しているが,いまだ海洋資源や周辺環境を長期的に観測する装置が実現していないため,海洋資源の生成や減少メカニズムは解明できるだけの十分なデータが計測できておらず,資源の有効利用に至っていない. 海洋資源開発に必要不可欠な時系列データを計測するために,低リスク(紛失リスクが少なく,紛失してもコスト的に損害が小さい)で広範囲に渡って海底を長期間観測できる装置の実現が望まれている.本研究では高価なセンサを搭載することなく低リスクで長期観測ができる図4で示すようなケーブル拘束型海中ロボットを用いた長期観測装置を開発した.本装置は海底に設置されたステーション,航行しながら海底を観測するロボット(CUV:Cable restraint Underwater Vehicle),CUVとステーションを連結するケーブルの3つで構成される.ステーションには,CUVが数か月以上もの間航行できるだけの大容量バッテリーが搭載され,上部にはCUVと連結されたケーブルを巻き付けるためのリールが取り付けられている.CUVは自身の移動用として複数のスラスタを搭載し,必要な電力はステーションからケーブルを介して供給される.CUVが高度をリールと同じ高さに維持した状態で,ステーションを中心とした円の遠心力方向にケーブルが伸びきるだけの十分な推力,かつ円の接線方向にも推力を発生させたとする.その時,理想環境においてケーブルは常にリールの接線となり,CUVはインボリュート曲線に近い軌道を通り,CUVの移動に合わせてケーブルが巻きだされる.この状態を維持するとケーブルはリールから全て巻き出され,今度はケーブルがリールに巻かれながらCUVは航行する.完全にケーブルがリールに巻かれた後,CUVの接線方向の推力を反転させると,CUVは先ほどと逆回転で同様の航行を行う.外力がなく,毎回ケーブルがリールの同じ位置に巻き付いたと仮定した場合,上記の行動を繰り返すCUVはほとんど同じ軌道を通ることが可能である.つまり,本装置は,CUVがケーブルによる拘束状態を維持し,かつ前進(または後進)するように推力を発生させることで,ステーションを中心とし最大ケーブル長と同じ半径の円内の海底をくまなく観測することが可能である.また,CUVの航行はケーブルとリールの拘束によって決定されるため,依存するパラメータを調整することで航行軌道を設計するが可能である.
本装置のCUVが設定した軌道を理論通りに航行できるかを検証するため,水槽にて評価試験を実施した.この時,CUVのSurge推力は流体抵抗から算出した0.1m/sの速度を実現するために必要な推力,Sway推力はカテナリー曲線から算出したケーブルを撓ませないために必要な推力を設定した.図5に設定したCUVの軌道,モーションキャプチャーで計測した実際の軌道との比較,図6にCUVで撮影した画像と設定軌道をもとにフォトグラメトリー手法で復元した水底の3D画像を示す.図を見て分かる通り,本装置は設定した軌道を最大誤差0.05m以下の精度で航行し,速度などの高価なセンサを使うことなく高い精度で水底を観測できることが分かった

3.今後の方向性・展望
近年,AI技術の発展が目まぐるしく,ChatGPTやStable diffusionのように素晴らしいアプリケーションが開発されており,AIの技術が水中ロボット業界の発展に大きく寄与すると考えられる.数年前から本研究室でもAIを使ったデータ処理やアプリケーションを開発しているが,まだ実海域で通用するような実用的なものには至っていない.より実用的かつ社会に貢献できるような水中ロボット技術を実現できるよう,AIなどの最新の技術を常に吸収しながら研究に励んでいきたいと思う.
【著者紹介】
西田 祐也(にしだ ゆうや)
九州工業大学 大学院生命体工学研究科 人間知能システム工学専攻 准教授
■略歴
- 2011年 3月九州工業大学生命体工学研究科脳情報専攻 博士後期課程修了 博士(工学)
- 2011年 4月九州工業大学生命体工学研究科脳情報専攻 研究職員
- 2012年 4月東京大学生産技術研究所 特任研究員
- 2014年11月東京大学生産技術研究所 特任助教
- 2015年 3月九州工業大学若手研究者フロンティア研究アカデミー 特任助教
- 2018年 4月九州工業大学若手研究者フロンティア研究アカデミー 助教
- 2019年12月九州工業大学大学院生命体工学研究科人間知能システム工学専攻 准教授
FLIR、都市間交通流と道路の安全性を強化するTrafiBot Dual AIカメラ

フリアーシステムズは、都市間交通インテリジェンス用マルチスペクトルカメラTrafiBot Dual AIを発表した。この閉回路トラフィックカメラは、ドライバーが目に見えない物体にぶつかったり、急速に拡大する車両火災に巻き込まれたりする危険性が最も高いトンネルや橋上での安全性を向上させるように設計されているという。
TrafiBot Dual AIなら、帯域幅の制約により画像解像度を低下させることなく、またデータを損失することも無い。高速のサーマルコア、最も信頼性の高い道路トンネル用14ビット早期熱異常検知、最高の検知性能を実現する堅牢な人工知能(AI)、最も信頼性の高い都市間道路における交通データ収集を提供する。
TrafiBot Dual AIでは、世界中で収集された数百万枚のフリアーシステムズの画像から開発され、学習を重ねたフリアー独自の3つのAIモデルを同時に使用する。1つのモデルは逆走検知や落下物を識別・分類し、残りの2つは、サーマル画像と視覚ストリーム上で車両を分類し、これには電動スクーターのような特殊な車体や、歩行者や自転車利用者のような脆弱な道路利用者も含む。
フリアーシステムズが特許を取得した3Dワールドトラッカーと組み合わせることで、TrafiBot Dual AIはシーン内の事故を検知する能力が向上した。車両がカメラの視界に入ると、たとえ追跡対象が他の車両や物体、道路インフラに遮られたり、不明瞭になったりしても、カメラは車両の速度や軌道を予測する。また、TrafiBot Dual AIは、突然の車線変更や逆走ドライバーを検知可能である。交通管理者に重要なデータを提供することで、誤警報を減らし、安全性に関係する事故を適切に管理することができる。
TrafiBot Dual AIは、早期熱異常検知を次のレベルに引き上げる。カメラ側で14ビットの熱情報を直接分析することで、カメラアルゴリズムに64倍以上の情報を与え、比類のない熱異常検知、速度、信頼性を保証すると同時に、誤警報の可能性を劇的に低減し、道路トンネルの早期熱異常検知の新たな基準となっている。
●全天候型ハウジングと柔軟な設置
TrafiBot Dual AIでは、革新的な3軸回転デザインにより、トンネルの傾斜壁や狭いスペースなど、特殊な道路インフラへの取り付けの柔軟性が高められている。パン、チルト、横回転する3軸カメラスイベルがあるため、設置に時間のかかるカスタムアダプタープレートは不要。また、内部の傾斜センサが自動的に校正するため、設置にかかる時間とそれに伴う交通の混乱をさらに軽減することができる。
TrafiBot Dual AIは、IP66/67等級の、非腐食性、海洋グレードのステンレススチール製ケースに収容している。このケースは、塩分の高い空気や湿気、あらゆる天候条件だけでなく、道路やトンネル内の清掃作業による高圧ブラストにも耐えるように設計されている。4Kカメラの光学ズームは6~22mm、検出範囲は最大300mで、従来のフリアーシステムズのインテリジェントトラフィックカメラと比較して、カメラ1台あたりの検出範囲が広くなっている。
●ソフトウェアとの統合
このカメラは、TrafiBot Dual AIからのデータを収集・整理できる新発売のソフトウェア「FLIR Cascade」と統合できるように設計されている。最先端でインテリジェントな事故フィルタリングシステムにより、関連する事故のみを交通管理者に表示する。事故が検知されると、シーンの短い4K解像度のカラーおよび/またはサーマルビデオクリップにフラグが立てられ、トラフィック管理チームは、それを即座に確認できる。TrafiBot Dual AIはさらに、ビデオ管理システムと統合して、ライブ映像を提供することもできる。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000044.000027932.html
工学院、低温動作可能な薄膜トランジスタ型CO2センサを開発
工学院大学は、薄膜に関する研究を多領域で進めており、相川慎也 教授(電気電子工学科)は、薄膜トランジスタを用いたCO2センサを考案した。
大学発の研究成果でイノベーションを支援すべく、10月15日から18日に幕張メッセで開催されるデジタルイノベーションの総合展「CEATEC 2024」で公開する。
温室効果ガス削減に向けて、排出の現状を把握する高度モニタリング技術への要請が高まり、ネットワーク化により分散配置可能なIoTガスセンサの開発が急務である。IoT化により、空間カバレッジの向上が期待できるとともに、迅速かつ高感度な検出が可能となりますが、そのためには、センサデバイス自体が安価に作製でき、小型かつ低消費電力であることがキーポイントとなる。
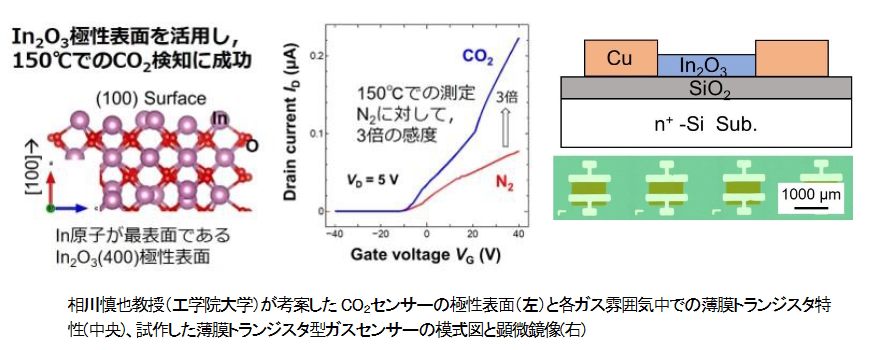
相川慎也教授が考案した薄膜トランジスタ型CO2センサは、低コスト化と小型化が可能であるとともに、半導体薄膜の極性表面を活用することで従来品より低温動作での高感度化を実証した(図左、図中央)。これは、センサーの消費電力抑制につながる成果である。CH4などの温室効果ガス検知も適用可能なメカニズムと、薄膜の特徴の一つである集積化から、この一台で複数種の温室効果ガスを同時にセンシングすることも理論上可能であるという。
■相川慎也 教授(工学院大学 電気電子工学科)のコメント
査読付き論文を始め、学術面では実績と根拠がありますが、産業界での本技術の利活用はこれからです。まずは共同研究などでラボレベルから社会実装レベルに近づけ、技術で社会貢献できますと幸いです。薄膜に関する現場での課題や悩みも伺い、引き続き、SDGsの実現など社会課題解決をゴールとする研究に取り組みたいと考えています。
ペロブスカイト太陽電池試作用インクジェット塗布装置 PerovsJet販売開始
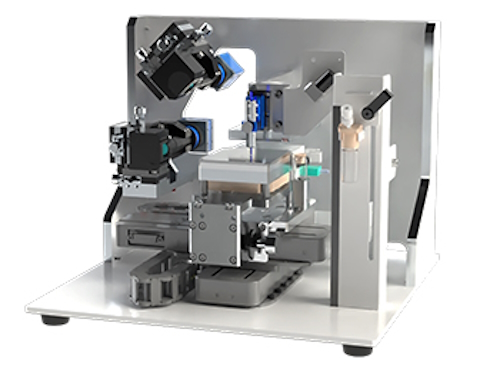
(株)マイクロジェットは、ペロブスカイト太陽電池におけるペロブスカイト層のインクジェット塗布評価や試作を実現できる卓上型のインクジェット装置を2024年10月8日から販売開始した。
【ペロブスカイト太陽電池】
ペロブスカイト太陽電池は結晶シリコン型太陽電池に代わる次世代太陽電池として世界中の関心が集まっている。この太陽電池はペロブスカイトと呼ばれる結晶構造を持つ化合物を使用しており、低コストかつ軽量でフィルム状に加工でき、シリコン型では不可能であった窓ガラスやビルの壁面への設置、自動車への搭載も可能であり、日本発の技術として大きな注目を集めている。
【開発の背景】
現在、ペロブスカイト太陽電池の研究開発は主にラボスケールで進められており、特にスピンコート法による薄膜の機能評価が中心です。しかし、スピンコート法は大型化が難しく、将来の商用化・量産化を考えると、ペロブスカイト太陽電池の大面積での製造が重要な課題となっている。
この課題を解決する有望な技術の1つとして注目を集めているのが「インクジェット技術」である。プリンターに使われているインクジェット技術を応用して、インクの代わりにペロブスカイトの液材料を小さなノズルから噴射して均一なペロブスカイト層を形成することができ、塗布面積の大面積化にも適した技術といえる。すでに大型の液晶パネルの製造工程の一部には、このインクジェット技術が利用されていることからもこの技術の応用が期待されている。
さらに、インクジェット技術は必要な部位のみに塗布するため材料の使用効率が高く、画像や文字などのグラフィカルなパターン形成も可能であり、他の塗布方式に無い特徴も兼ね備えている。
【従来の課題と解決方法】
しかしこれまではペロブスカイト液材料のアタック性が強いために、インクを噴射するヘッドと呼ばれるパーツがすぐに壊れてしまうという致命的な問題があった。そこで同社ではこのヘッドを強化し、様々な液を吐出できるヘッドを搭載し自在に塗布試験が行えるインクジェット塗布装置 PerovsJet を開発した。
その特徴は、ガラス製のシングルノズルヘッド GlassJet を搭載することで、DMFやNMPなどのアタック性が強い液にも対応可能であることである。また、ノズルの目詰まり防止機能も搭載されているため、ペロブスカイト層形成に必須の低湿度下での薄膜形成においても目詰まりせず、安定した薄膜形成が可能となった。
なお、本装置を使用した受託試験や自社の液材でのサンプル作製も相談に応じる。
【装置の特徴】
■DMF、NMPなどにも耐性を有する高耐液性ヘッド搭載
■任意の液滴量・印刷解像度設定により膜厚調整が容易
■0.5 cc以下の少量の液材でのサンプル作製実験が可能
■低湿度環境内での実験を想定した専用グローブボックス(オプション)
■2台のカメラで着滴と飛翔液滴を観察可能
■プログラマブルヒーターで塗布・乾燥工程等を制御
【用途例】
■ペロブスカイト太陽電池の試作
■ペロブスカイト液材料のインクジェット吐出評価
■有機半導体の試作
■センサーなどの微細デバイスの試作
■金属ナノインクによる回路形成
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000004.000148304.html
旭化成エレ、昇圧 DC/DC コンバータが藤倉コンポジットの液体検知センサに採用

旭化成エレクトロニクス(株)は、開発・量産している極めて低消費電力かつ低電圧で駆動する昇圧DC/DCコンバーター「AP4470」が、藤倉コンポジット(株)が開発した「バッテリーレス液体検知センサ」に採用されたと発表した。
旭化成エレクトロニクスが開発した AP4470 は、DC/DC コンバーターの低消費電力化により僅か 1μW の入力電力に対しても昇圧動作が可能で、センサや通信などの機能を実現することができる。必要となる電力は数滴の水など、身の回りの様々なものから得ることができる。これにより自立電源のエナジーハーベスティング(環境発電)分野のセンサなどでの使用が期待されている。
藤倉コンポジット社は、センシング技術において長年の経験と実績を持ち、様々な産業向けに高性能なセンサソリューションを提供しており、同社がこの度開発した「バッテリーレス液体検知センサ」は、外部電源を必要とせず、さらに電池レスで動作する画期的なセンサである。これまで広く使われていた有線のセンサでは作業員による設置作業が必要だったが、本製品はその作業が不要になり、配線や電源の設置が困難な場所や、コスト削減が求められる用途に適している。このソリューションは、水道管の老朽化による漏水検知や、河川の水位監視など、インフラ用途においても大きな可能性を秘めている。迅速かつ効率的な水害対策やインフラ維持管理を支援する。
AP4470 をはじめとする旭化成エレクトロニクスのエナジーハーベスティングICは、水のみならず、室内光や体温といった身の回りに存在するわずかな環境エネルギーを収集し、電子デバイスを動作させることが可能。また、部品点数を減らせるため、IoT デバイスの小型化にも貢献する。同社は、各種センサや無線通信を行うビーコンなど、これまで実現が難しかったアプリケーションの開発を支援するとしている。
プレスリリースサイト:https://www.akm.com/jp/ja/about-us/news/2024/20241009-fujikura-composites/
シリコンフォトニクス技術で多彩な光センサを実現する超小型光集積回路チップ
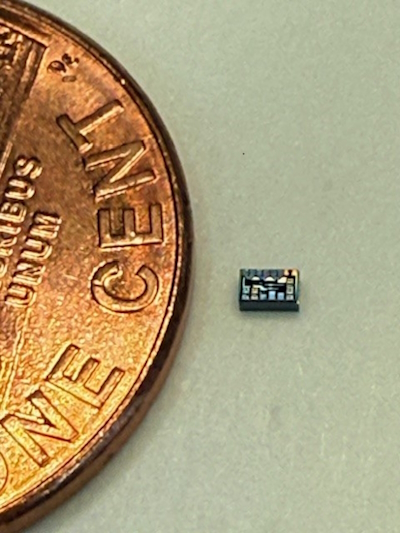
OKIは、光回路の半導体であるシリコンフォトニクス技術を用いて、光ファイバーセンサ、レーザー振動計、光バイオセンサなど、多様な用途に適用可能な超小型光集積回路チップの開発に成功した。
これにより、LSI(注1)のような超小型化・低消費電力化、大量生産による光センサモジュールの圧倒的な低コスト化を実現できる。光センサは、光損失の少ない光ファイバーや光導波路を用いて、光のまま振動や歪、温度などの物理現象を検出・処理・伝送する技術であり、それ自体が省エネルギーでセンシングを実現するグリーン技術になる。シリコンフォトニクス技術は、これまで局所的な活用に限られていた光センサの適用領域を拡大できる技術であり、GX(注2)の進展への大きな貢献が期待できるという。
社会インフラの老朽化や労働人口不足、環境問題、健康寿命の延伸など、現代社会が抱えるさまざまな課題に対し、高精度なセンサ技術と膨大なセンサデータを円滑に収集するネットワーク技術が求められている。エネルギー損失が少ない光の性質を活用した高精度な光センサは、これを実現する有効な技術の一つである反面、大型・高価であるため、研究用途や大規模インフラへの適用など一部への適用に留まっていた。
OKIは長年、光通信用トランシーバを中心にシリコンフォトニクス技術の研究開発に取り組んできた。現在も研究対象にさまざまな光センサを加え、開発を継続している。シリコンフォトニクス技術は、個別の光部品を光ファイバで配線することにより実現していた複雑な光回路を、半導体の微細加工技術を用いてシリコン基板上に統合・集積回路化する技術である。コンピュータに欠かせないLSIと同じ製造方法を用いるため、小型軽量化、省エネルギー化、大量生産による低コスト化が可能である。これまで大きく重厚でハンドリングの難しかった装置を、スマートフォンやタブレットのようなサイズ感で実現でき、光センサの適用領域を飛躍的に拡大できるとのこと。
用途例:以下のような用途に適用可能。
・光ファイバーセンサ
光集積による小型化、低価格化により、橋梁やトンネル、法面など、ありとあらゆる社会インフラの
モニタリング・保守への適用拡大が可能
・レーザー振動計
従来の光回路に対して体積比で約20万分の1の小型化ができ、ドローンやロボットへの搭載が可能なほか、
一般的な振動計よりも広帯域な周波数特性を活かし、設備点検の高度化、省人化に貢献
・光バイオセンサ
多様で複数の異なるバイオ物質を迅速・簡易に判別可能で、バイオテクノロジー・ヘルスケア領域での
検査高度化に貢献
・光トランシーバ
光アクセスネットワーク用の超小型・低コスト高速トランシーバーが実現でき、大容量データ通信に貢献
用語解説
注1:LSI(Large-Scale Integration:大規模集積回路)
シリコンなどの半導体チップ上に微細な電子部品や配線を高密度に集積したデバイス
注2:GX(Green Transformation)
温室効果ガスの排出を削減し、持続可能な社会を実現するための取り組み
プレスリリースサイト(OKI):https://www.oki.com/jp/press/2024/10/z24041.html
奥村組、山岳トンネルにおける覆工コンクリートの自動打設システムを開発
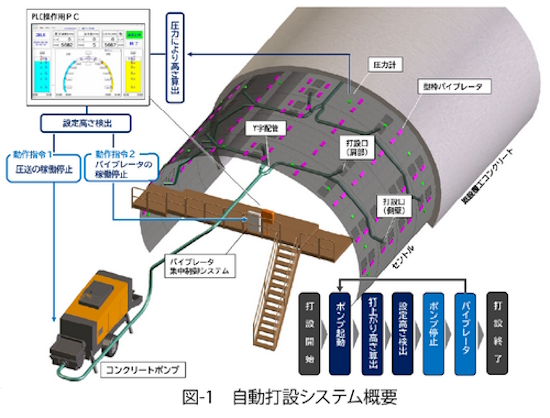
(株)奥村組と北陸鋼産(株)は、山岳トンネルにおける覆工コンクリートの自動打設システム(以下、「本システム」)を開発した。
本システムにより、覆工コンクリート打設作業の省人化・省力化とともに、安定した品質の確保が実現する。
【背景】
山岳トンネル工事における覆工コンクリートの打設(打込みや締固めなど)には、多くの熟練技能労働者が必要となるが、慢性的な人手不足により十分な人数を確保することが難しくなってきている。また、同工程は、技能労働者の熟練度によって覆工コンクリートの品質にばらつきが生じやすいことに加え、繰り返し作業や狭隘な場所での苦渋作業が多く、従事する技能労働者の負担が大きいことも課題として挙げられていまる。
そこで奥村組は、品質を確保しつつ省人化・省力化を図る本システムを開発した。
【概要】
本システムは、同社が以前開発した「高速打設システム」と「圧力計による打設高さ検知システム」を組み合わせ、これに圧送ポンプ機のリモコンとバイブレータの制御盤を接続したもの。予め設定した打上がり高さに応じて、ポンプの圧送速度、ポンプとバイブレータの稼働・停止を自動制御することにより、覆工コンクリートの打設を、打設口の切り替え作業を除き、自動で行うことができる(図-1)。
【実大規模施工実験での検証】
同社技術研究所において、実大規模のセントルに中流動コンクリートを用いた施工実験を行い、本システムの有効性を確認した。バイブレータの稼働のタイミングや作動時間を、労働者の感覚に依存することなく、計測値に基づき定量的に制御し、脱型後の表面観察や表面透気係数試験等で所定の品質基準を満たしていることを確認した。さらに、異なるメーカーの2種類のコンクリートポンプを用い、汎用性も確認した。
プレスリリースサイト:https://www.okumuragumi.co.jp/newsrelease/2024/post-56.html
都産技研、世界最高性能のリン系熱電材料を開発
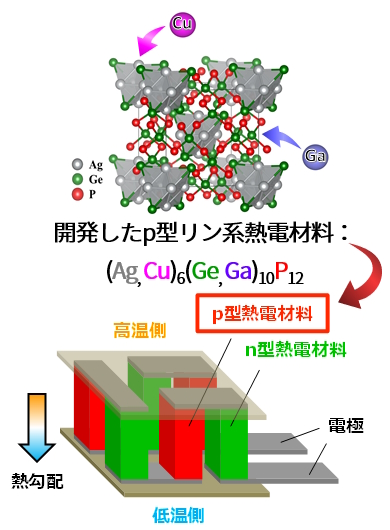
都産技研(地方独立行政法人東京都立産業技術研究センター)は、温度差を電力に変換する『熱電材料』について、優れた熱電特性を有し、有害元素を含まないp型リン系熱電材料を開発した。さらに、信頼性のあるデバイス駆動に重要な機械特性と熱膨張特性が優れていることも見い出した。排熱回収に関する本成果を活用して、エネルギー問題の解決やGXの実現を目指す。
・背景
熱によって生じる材料内の温度差を電力に変換する熱電材料は、排熱回収やIoTセンサ用自立電源としての応用が期待されている。しかしながら、中温域における従来のp型熱電材料は、①有害元素を含む、➁機械特性に乏しい、➂動作温度付近における非線形な熱膨張率の変化により熱電材料自身へのクラックの発生や金属電極の剥離、などの多くの課題を抱えており、社会実装を進めるためにはこれらの課題をクリアした材料の開発が求められていた。
・開発のポイント
◆有害元素を含まないリン系熱電材料で熱電性能の大幅な向上に成功。温度差を電力に変換する熱電性能の指標となるZT(無次元性能指数)> 1を、リン系材料において世界で初めて達成。
◆熱サイクルにより生じる熱応力や膨張収縮に耐えうる優れた機械特性と熱膨張特性を実現。
◆優れた特性から、工場や自動車の排熱を利用した発電、IoTセンサ用自立電源への展開に期待。
◆実用化に必要となる熱電デバイス作製において、ペアとなるn型熱電材料と金属電極の候補を提案。
プレスリリースサイト:https://kyodonewsprwire.jp/press/release/202409307338/html
ALCANTARA®が月面シミュレータ「LUNA」の居住空間に採用

メイド・イン・イタリーのマテリアルブランド「ALCANTARA®」は、9月25日(水)にドイツ・ケルンで完成した欧州宇宙機関(ESA)の世界最大規模の月面シミュレータ「LUNA」の居住空間インテリアに採用された。
この最先端施設は、1000㎡の月面再現エリアを備えており、SAGA Space Architects(SAGA)による次世代の月面模擬人間居住施設「FLEXHab」と連携して使用される。
コペンハーゲンを拠点とする建築・エンジニアリング企業であるSAGAが、ESAのLUNA施設と連動して使用される次世代の月面シミュレーション居住空間「FLEXHab」を設計・製造した。
SAGAは、デジタル製造技術、人工知能、センサ技術の進歩を活用し、極限環境でも快適な居住空間を創り出すことを目指している。
SAGAは、居住空間の「ギャレー」(乗組員が休憩を取ったり、食事をしたり、社交を楽しむエリア)と、充実した設備を備えたラボにALCANTARA®を採用した。
ギャレーには、空間を彩るため、ALCANTARA®のボヘミアントーンで彩られたパッド入りベンチが設置されている。ラボには、アイスシェードのALCANTARA®が選ばれ、柔らかく包み込むような空間を創り出すため、壁のパネルがALCANTARA®で覆われている。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000097.000044421.html