セントマティック(株)
4.表現する/伝える
前述の通り、2つのサービスを紹介し、それぞれ計測している方法も対象も異なるが、ユーザーの感性を推測した結果、すなわちAIが出力した結果を伝えるために様々な方法をとっている。https://youtu.be/dJUCYWcMPFs https://www.youtube.com/watch?v=KtTrryg-Fts
5.アートとデザインの境界たる位置にある産業
CMや香水といった一見全く異なる対象向けにサービスを提供してきたが、それらの製作される過程や、業界構造は実はかなり近しいと感じている。
6.マスターピースは機械で計測できるのか?(作れるのか?)
人間の感性を測ること、特に、AIを使って計測、表現、可視化することを述べてきたが、このようなAIは基本的には過去のデータを使って作られたものであり、常に現実世界より一歩後ろを歩んでいる。AIやデジタルより先に「感性」を動かしているのは人間である。この構造は今後も変わらないはずだ(少なくともロボットが人間と同じように人権を持って生活をしていない現時点では)。紹介した取組以外にも、世間一般には多くの感性を計測/予測するサービスが存在するが、あくまで過去の経験から作られたものである。そのようなサービスでは、過去から非連続的に進化した次世代のマスターピースを正しく計測/予測出来ないであろう。むしろ過去の再生産されたものしか評価出来ないであろう。しかし、企業は蓋然性を高めるために、このようなサービスを捨てられず今後もより活用される機会は増えてくるはずだ。私は、我々人間の感性こそが常に世界の先端にあり(錯覚は起こりうるが、それを理解しつつ)正しいものであるという自負を持ち、世の中の刺激に心を向け、「我々がマスターピースを作るのだ」という意気込みが必要と主張していきたい。
【著者紹介】 大山 翔(おおやま しょう)
2015年慶應義塾大学経済学部卒業。新卒でNTTデータに入社。鉄道会社、自動車メーカー、研究機関等多くの企業に向け、ニューロサイエンスに関する営業企画、商品企画や、戦略~業務コンサルティングサービスを提供。通信事業者向けの大規模システム統合プロジェクト、インフラ事業者との新規事業創出、事業連携に従事した後、2020年よりNeuroAI及びD-Plannerの企画、後にサービス主幹を担当。多くの消費財メーカー、サービス業向けにサービス提供を実施。2024年より現職。主にフレグランス領域で営業企画やサービス企画を担当。
【著書(共著)】
大阪大学
5. フォトリフレクタ式
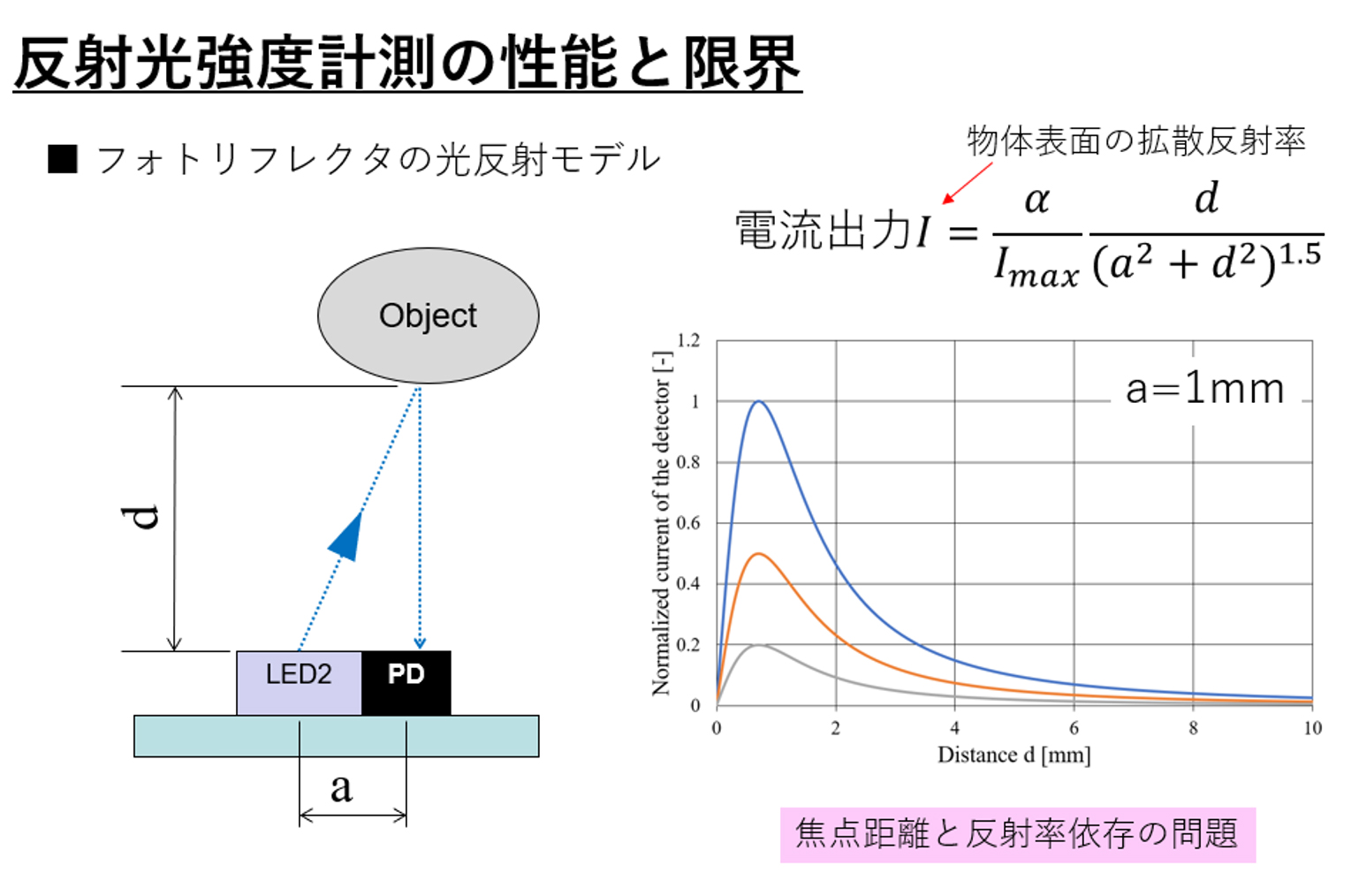
フォトリフレクタはLEDと受光部(フォトダイオードまたはフォトトランジスタ)がペアになった素子であり、物体面からの反射光強度を直接計測する素子である。2013年ごろまでは発光・受光素子のみでしか販売されていないことが多かったが、センサ素子の筐体内に発光・受光素子とAD変換・コントローラ部分が内蔵された製品も登場し、ロボット研究で利用しやすくなった。フォトリフレクタ式は数百マイクロ秒からミリ秒オーダで反射光強度を計測できることから、ロボットを正確な周期で高速制御する際に向いている。著者の研究グループもフォトリフレクタを使用した近接覚センサに関して10年以上、研究開発をしてきた[4] 。過去にはロボットハンドの指先に多数のフォトリフレクタを配置してアレイ状の近接覚センサを開発した。また、各指の近接覚センサフィードバックにより、ロボットハンドの指先位置を対象物面に沿って自動的に調整する制御や、アーム手先位置も同時に調整する制御を実現した。[5] などを提案してきた。しかし、適用可能な反射特性が拡散反射のみに限定されており、鏡面反射や透明物体は計測することができず、主にファクトリーオートメーションの現場需要に応えられない点が課題として残った。
図4:フォトリフレクタ式の測距特性と課題
6. AI処理を組み合わせたフォトリフレクタ式
フォトリフレクタの反射光情報から正確な距離情報を計測するためのキャリブレーション技術に関して、著者の研究グループが研究開発を行ってきた[6] 。この中で、汎化性能の高い独自の機械学習モデルを用いることで、透明や鏡面物体を正確に計測する技術を開発した(図6)。これは代表的な鏡面反射物体、透明物体、拡散反射物体を用意し、フォトリフレクタの反射光強度データを収集、学習モデルを生成することにより、物体面の光の反射特性の影響を受けづらい測距機能を実現する技術である。2×2のフォトリフレクタアレイの反射光情報に対して独自の機械学習を適用することで、距離情報に加えて物体面の傾き角度も推定できる点が特徴である。2018年ごろまでは学習モデルのパラメータ調整や汎化性能が高いモデルを評価することが極めて困難であったが、Optunaやpyhessianなどの最適化・解析ツールが登場したことで研究開発が進んだ背景がある。本センシング技術を用いることで、透明な試験管やスマートフォンの画面といった、鏡面反射特性が強い物体に対して自動的にロボットの手先位置決めを行う動作が可能となった。
図6:AI処理を組み合わせたフォトリフレクタ式、独自AIモデルにより複雑な反射光強度情報を線形な距離・角度にキャリブレーション(大阪大学、株式会社Thinker)
7. おわりに
本稿では、ロボットハンドの手指における近接覚センシングに焦点を当て、代表的な検出原理を紹介し、著者の研究開発・社会実装に関して簡単に紹介した。
参考文献
K. Koyama and M. Shimojo, A. Ming and M. Ishikawa, “Integrated control of a multiple-degree-of-freedom hand and arm using a reactive architecture based on high-speed proximity sensing” The International Journal of Robotics Research, Vol. 38, No. 14, pp.1717–1750, 2019.
K. Koyama and Y. Suzuki, A. Ming, M. Shimojo, “Grasping control based on time-to-contact method for a robot hand equipped with proximity sensors on fingertips,” IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 504-510, 2015.
小山 佳祐, 高速・高精度近接覚センサの開発とロボットマニピュレーションへの応用, 日本ロボット学会誌, 2022, 40 巻, 5 号, p. 393-398, 2022.
【著者紹介】 小山 佳祐(こやま けいすけ)
■著者略歴