(株)タイセー 第1製造2部
1. 海洋へのピエゾ実用化の歴史
物質に圧力を加えるとその圧力に比例した電荷が生じる圧電効果は1880年にジャック・キュリーとピエール・キュリーによって発見された。逆に物質に電圧をかけると変形する性質が逆圧電効果である。
その後、1922年頃にはフランスのランジュバンが水晶振動子を用いて、放射したパルス音波の往復時間から水深を読み取る技術を開発、1935年頃には英国で実用化され、多様な用途に広がっていった。
音波の音源となる圧電振動子においては、戦後の1947年にはチタン酸バリウム(BaTiO3 )セラミックスの圧電性が見出された。BaTiO3 は共振周波数の温度安定性があまり良くなかったため、温度安定性を重視しない魚探用電気音響変成器として1951年に実用化された。その後の活発な材料研究により、圧電振動子はPZT(チタン酸ジルコン酸鉛)に広く置き換えられた。
主に圧電振動子を音源とするソナー(SONAR:Sound Navigation and Ranging)は音波によって物体を検知する技術の総称である。
図 1 ハイドロホン簡易構造図
本報告では、海洋での圧電振動子に求められる性能、振動子の設計例、円筒型圧電振動子を用いたハイドロホンの例を紹介する。
2. 海洋での圧電振動子に求められる性能
主にアクティブ・ソナーの音源として使用される送波器用圧電振動子と、パッシブ・ソナーの検知用として使用される受波器用圧電振動子に要求される特性について述べる。
2.1 圧電材料の要件
送波器として使われる圧電振動子に求められる性能は次のとおりである。K が大きい材料d 定数が大きい材料(ε が大きい材料)Qm が大きい材料f 、電気機械結合係数K の温度係数が小さい材料
受波器として使われる圧電振動子に求められる性能は次のとおりである。g 定数が大きい材料C (比誘電率ε )が小さい材料(g = d/ε )ε 、電気機械結合係数K の温度係数が小さい材料
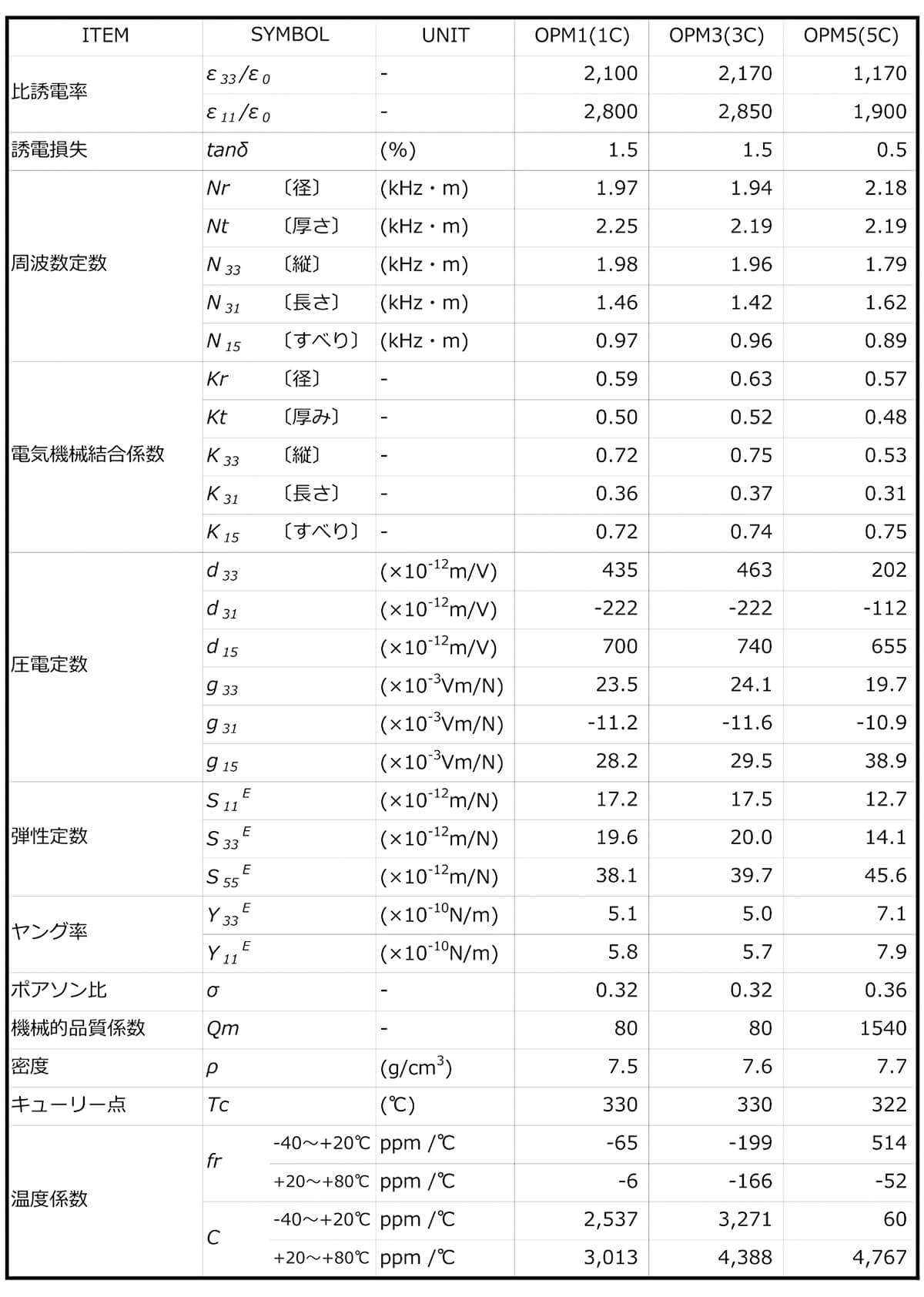
ここで、送受波器用圧電振動子に用いられているタイセーの圧電材料特性(代表例)を表 1に示す。
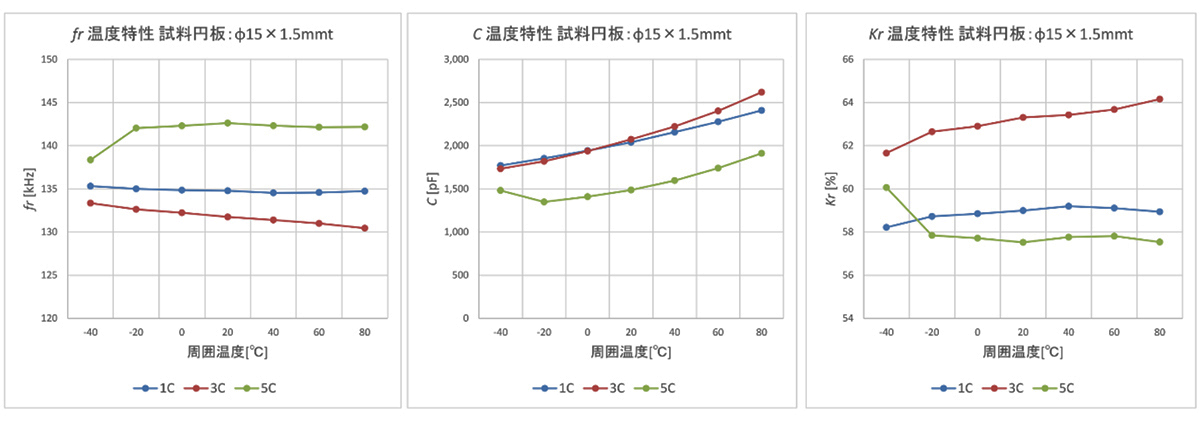
また、各材料の温度特性データを図 2に示す。
特に 3C 材は受波器用に広く用いられている材料であるが、温度変化に敏感なシステムには 1C 材のような温度特性が良い材料が選択される。
上述のとおり1つの圧電振動子を送受兼用にしている場合が多いが 送波器用材料として、誘電損失の少ない 5C 材が選択される場合もある。
表 1 タイセーの圧電材料特性例(代表値)
図 2 各種圧電材料の温度特性
2.2 圧電振動子の種類
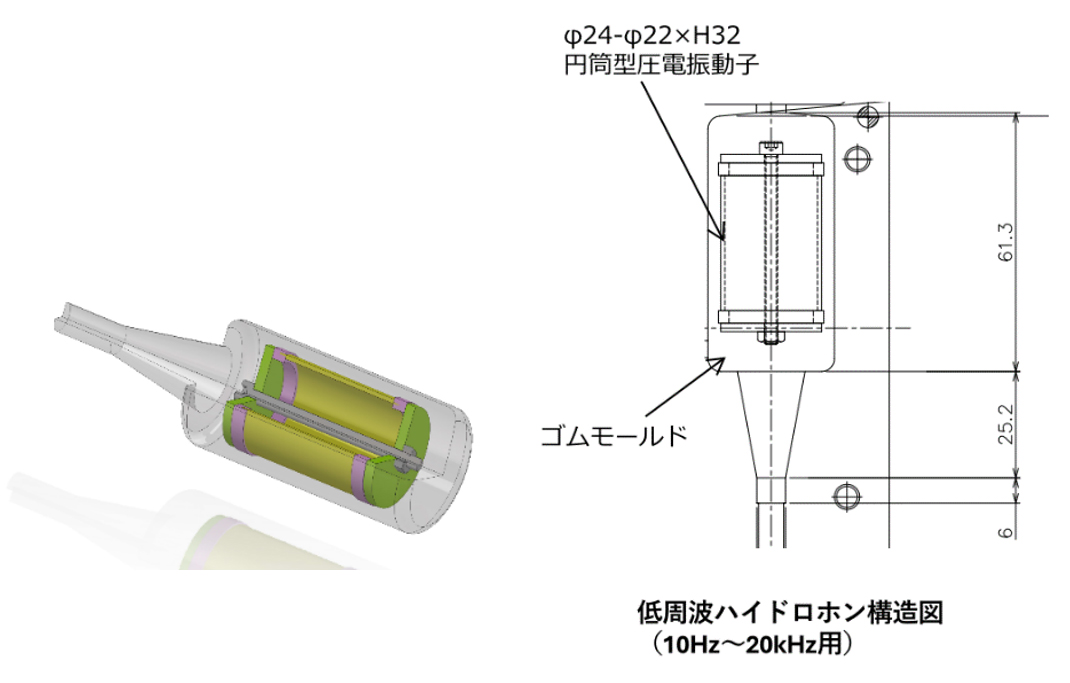
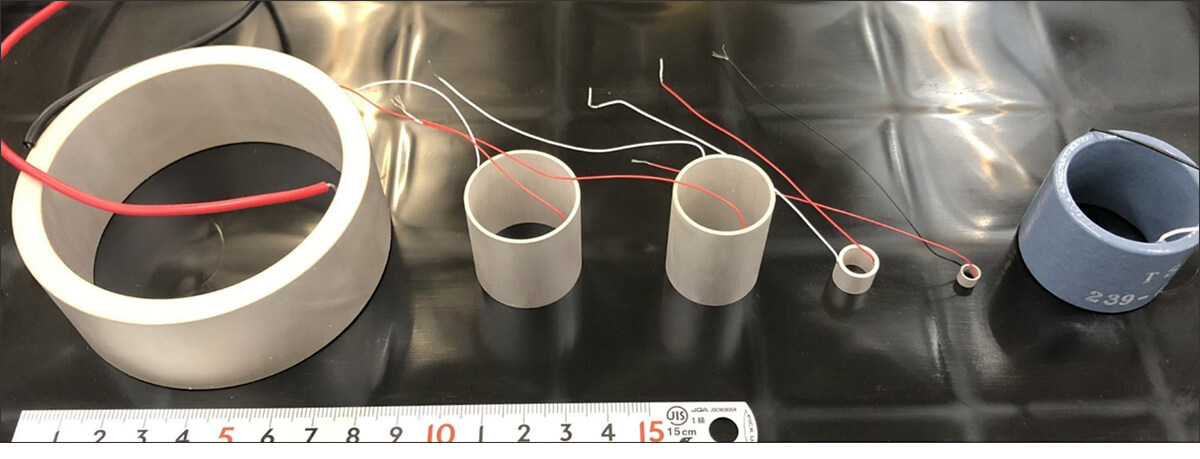
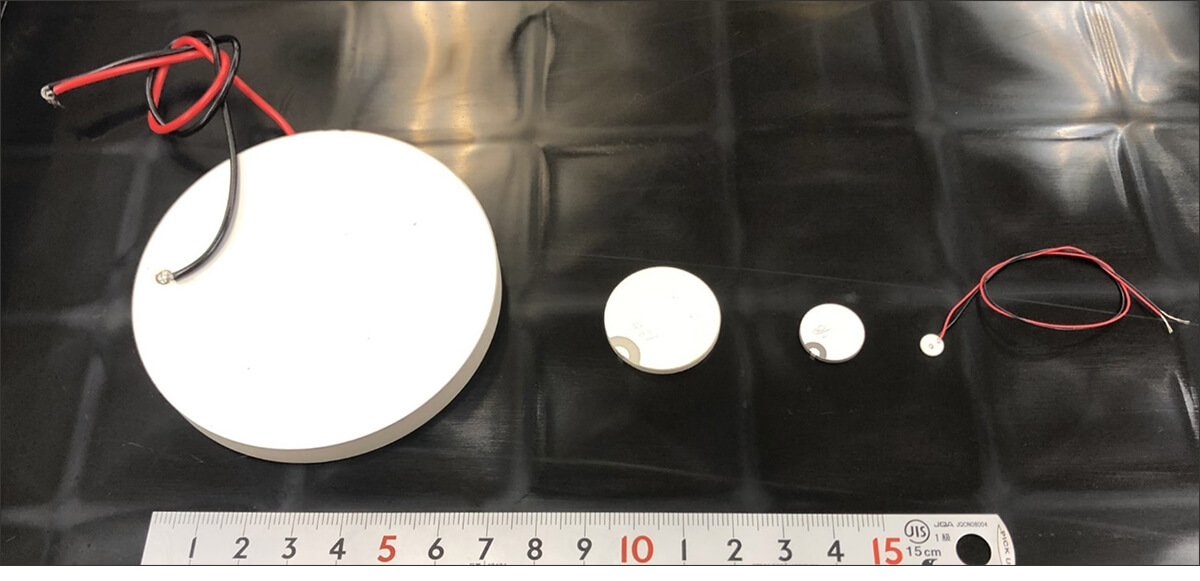
海洋で主に用いられるタイセーの圧電振動子例を図 3(円筒型)、図 4(円板型)に示す。主に、円筒型は円筒の径方向振動で水平方向に超音波を放射し、円板型は厚み振動により深さ方向に超音波を放射して使用される。
図 3 円筒型圧電振動子例
図 4 円板型圧電振動子例
画像は一例であり、製作可能範囲は 3項 圧電振動子の作製例 を参考、また、円筒、円板以外の角板や積層圧電振動子、コンポジット型圧電振動子、その他特殊形状も製造が可能である。
2.3 圧電振動子の基本特性
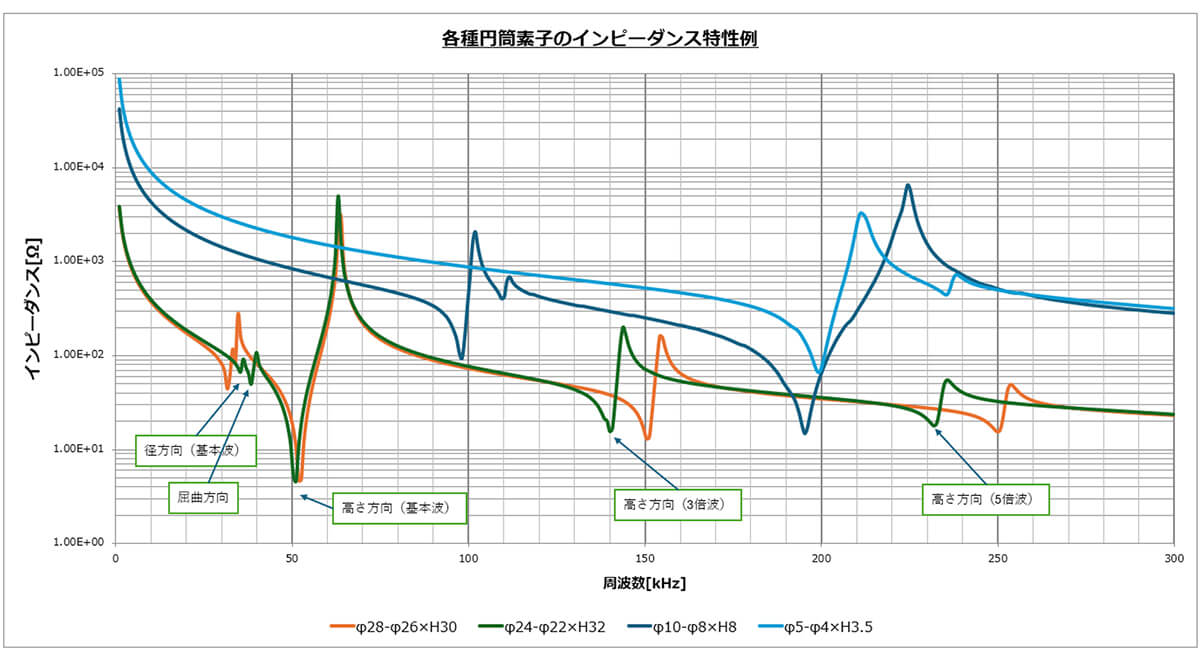
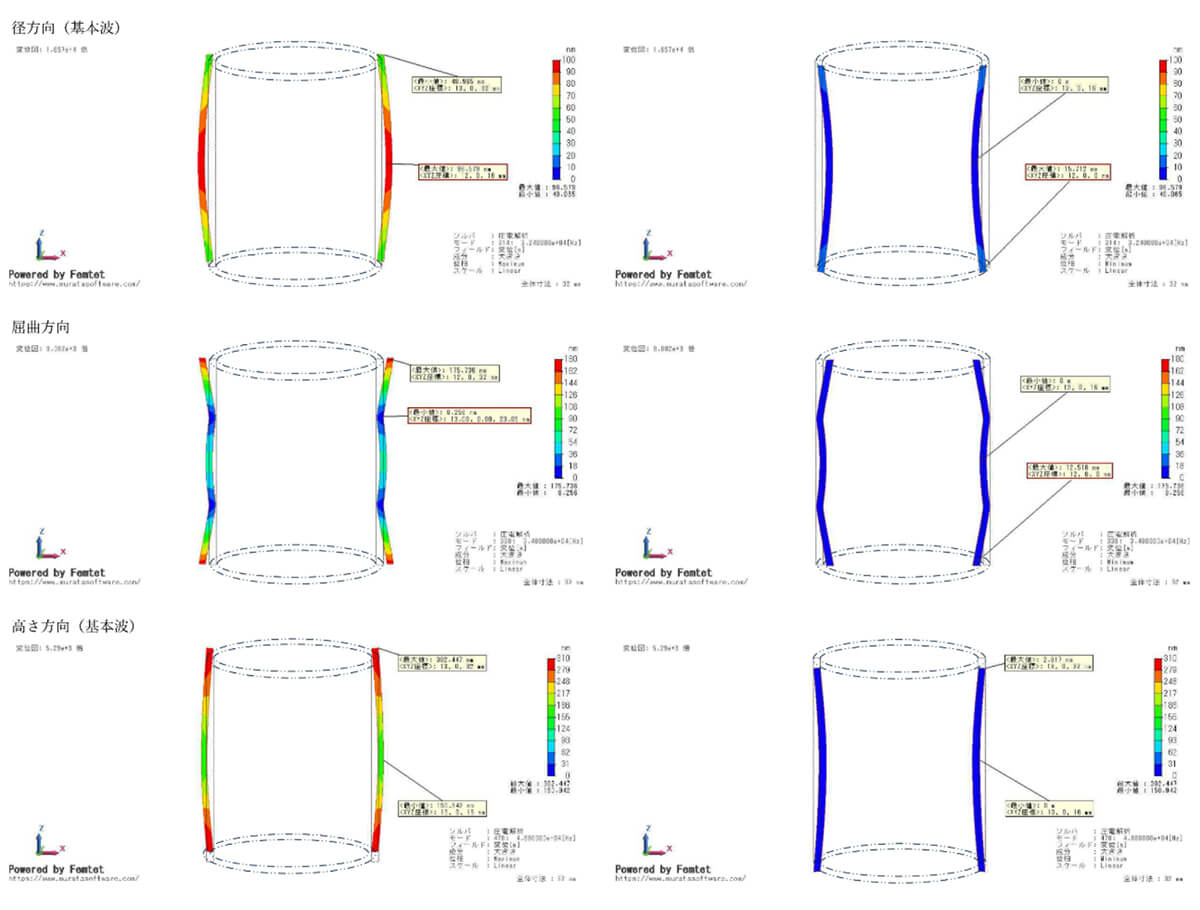
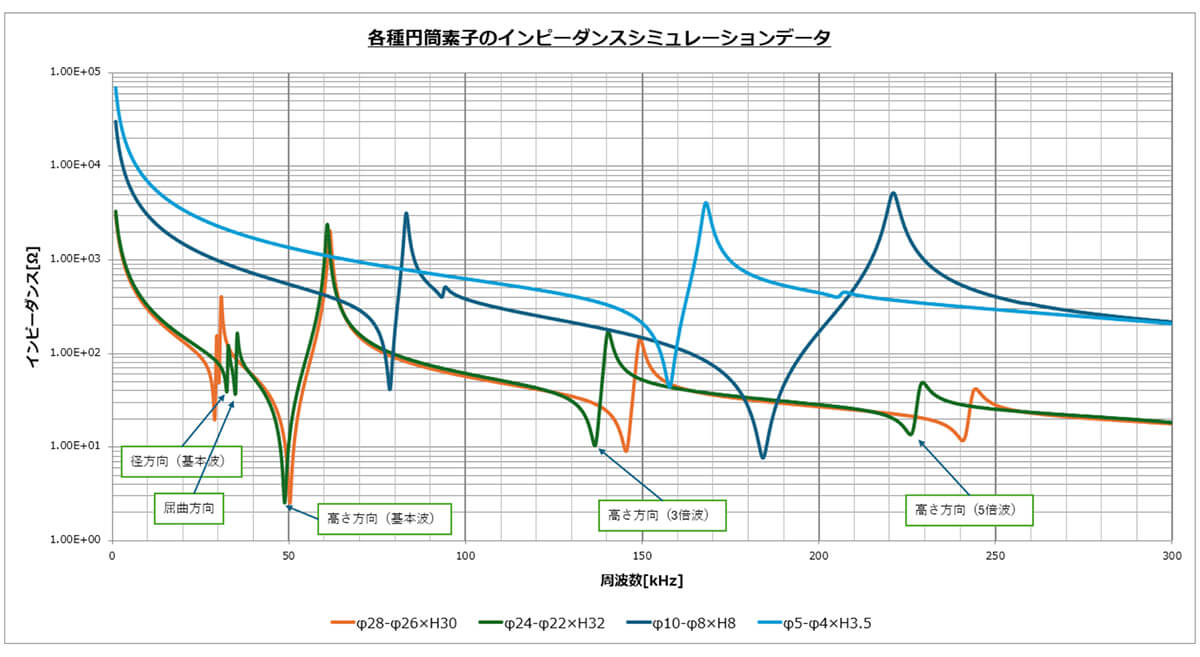
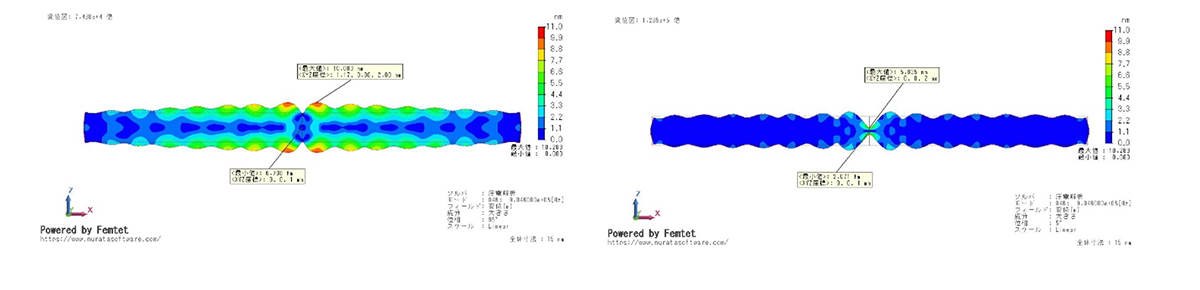
円筒型圧電振動子のインピーダンス特性測定結果例を図 5、φ24-φ22×H32の変位図を図 6、同シミュレーション結果を図 7、代表特性値を表 2に示す。
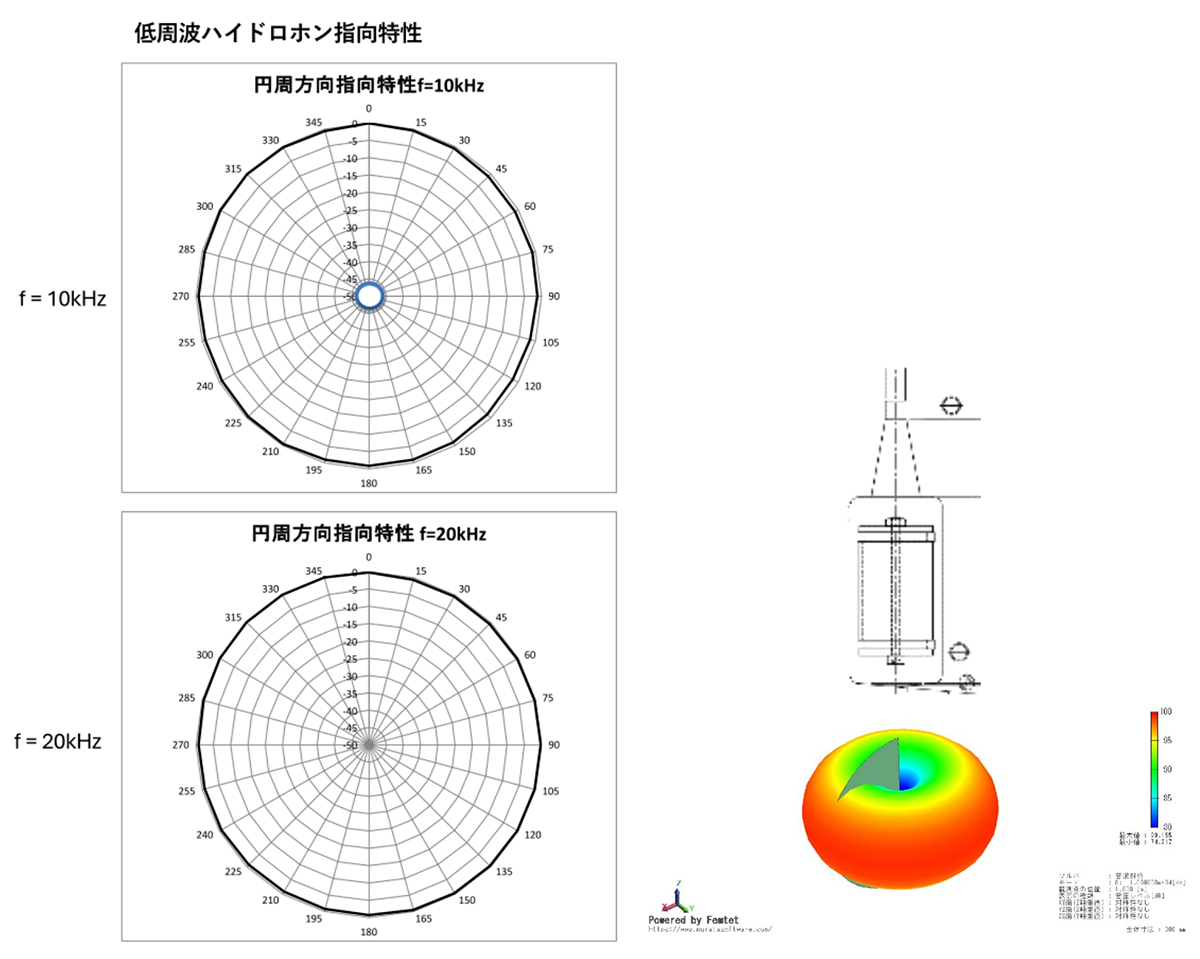
円筒型圧電振動子を用いた送受波器は図 8のとおり、円筒の水平方向で無指向性であり、径方向共振周波数以下で平坦な感度周波数特性が得られることから最も使用しやすい送受波器である。
図 5 円筒型圧電振動子のインピーダンス測定結果例
図 6 φ24-φ22×H32変位図
図 7 円筒型圧電振動子のインピーダンスシミュレーション結果
図 8 φ24-φ22×H32円筒型圧電振動子を組み込んだハイドロホンの指向特性(実測値)
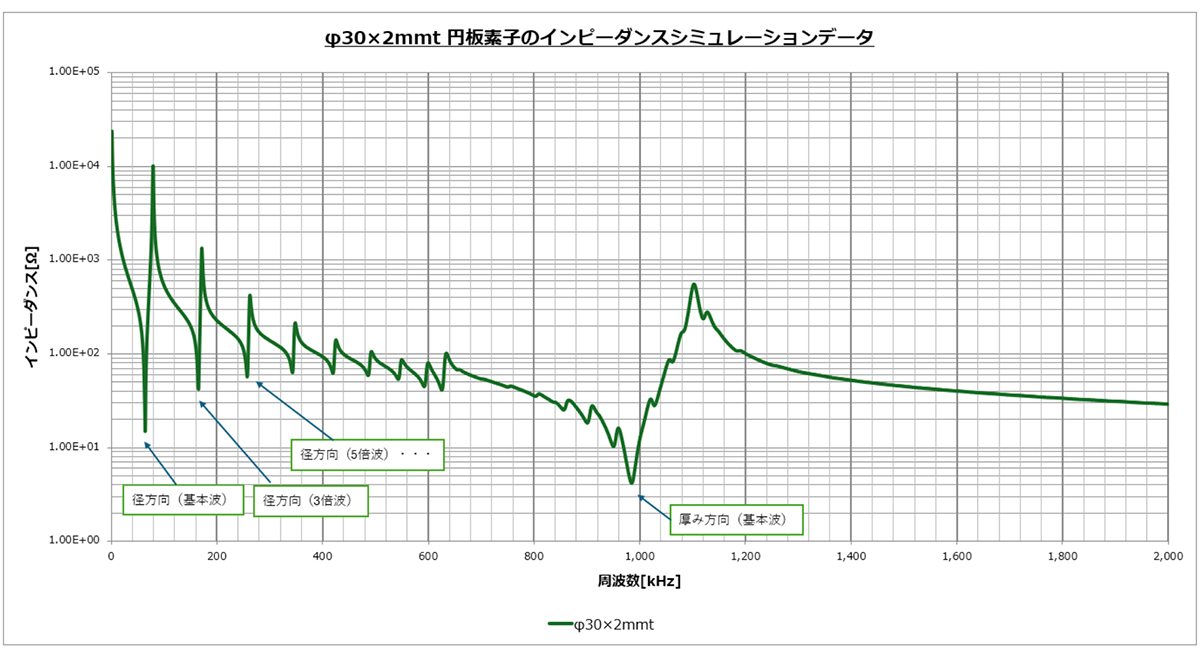
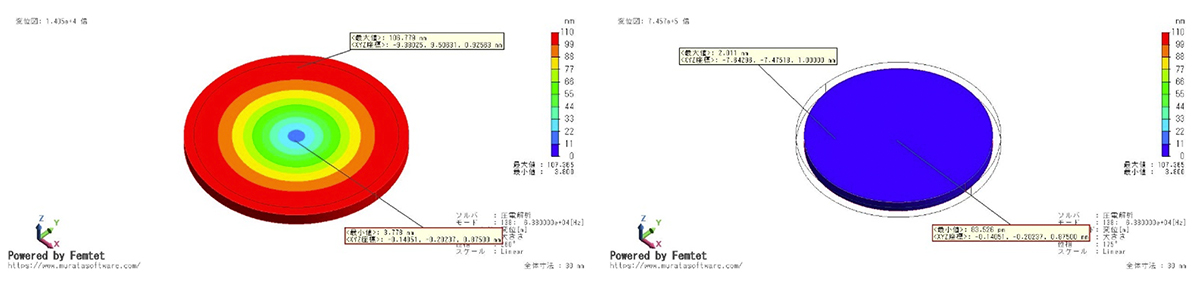
次に代表例として円板型圧電振動子であるφ30-2mmtのシミュレーション結果を図 9、同径方向(基本波)変位図を図 10、同厚み方向(基本波)変位図を図 11に示す。
図 9 φ30×2mmt インピーダンスシミュレーションデータ
図 10 φ30×2mmt変位図 径方向基本波
図 11 φ30×2mmt変位図 厚み方向基本波
次回に続く-
【著者紹介】 白坂 壽和(しらさか としかず)
■略歴
2000年 科学技術振興事業団(現 科学技術振興機構)プレベンチャープロジェクト参画 2002年 株式会社タイセー入社、圧電材料開発、積層圧電アクチュエータ、超音波センサの開発業務などをおこない、現在に至る
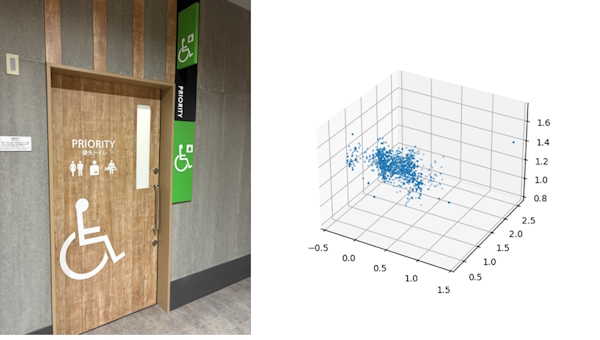
富士通(株)とイオンモール(株)が運営するショッピングモールであるイオンモール太田は、イオンモール太田内のバリアフリートイレにおいて、ミリ波レーダー分析AIを活用し、転倒などの早期発見、および用途外利用や長時間利用の検出に関する実証実験を2024年8月1日(木曜日)から2025年1月31日(金曜日)まで、実施する。
プレスリリースサイト:https://pr.fujitsu.com/jp/news/2024/07/29.html
セイコーエプソン(株)〔以下 エプソン〕は、高性能な6軸センサーを搭載した慣性計測ユニット(以下 IMU*1)の新ラインアップとして、高精度・低ノイズの防水・防塵型、プレミアムモデル『M-G570PR』を開発、2024年7月より量産を開始した。
プレスリリースサイト:https://corporate.epson/ja/news/2024/240729.html
仙台市では、データ連携基盤を利活用しやすい環境を提供し、企業、教育・研究機関、地域団体などの多様な主体による連携を促すことで、新たなデータ利活用事例の創出を目指す枠組み「DATA SENDAIプラットフォーム」を創設する。
特設サイト:https://data-sendai-platform.jp/