
名誉教授/特任教授
松本 和彦
ついで、走査型電子顕微鏡(SEM)を用いてグラフェン上のウイルスを観察する手法を開発した。通常、グラフェン上のウイルスをSEMで観察すると黒いシミのようにしか観察できず、明瞭にウイルスと判定することは困難であった。本研究で、グラフェン上のウイルスを化学薬品を用いて固定化し、金属薄膜をコートすることにより、明瞭にウイルスを観察することが可能になった。この手法を抗体を修飾したFETと修飾しないFETに適用しそれぞれのウイルス数をカウントしたものを図9に示す。FETアレイの左側は抗体を修飾した領域であり、ここではウイルスの結合数は21から51と分布しており、その平均数は37である。またFETアレイの右側は抗体を修飾していな領域であり、ウイルスの結合数は1から9と分布しており、その平均数は4である。従って、抗体のある領域では抗体のない領域と比較して約10倍のウイルスが結合していることが判明した。これにより抗体に選択的に結合しているウイルスが多数存在していることが確認できた。
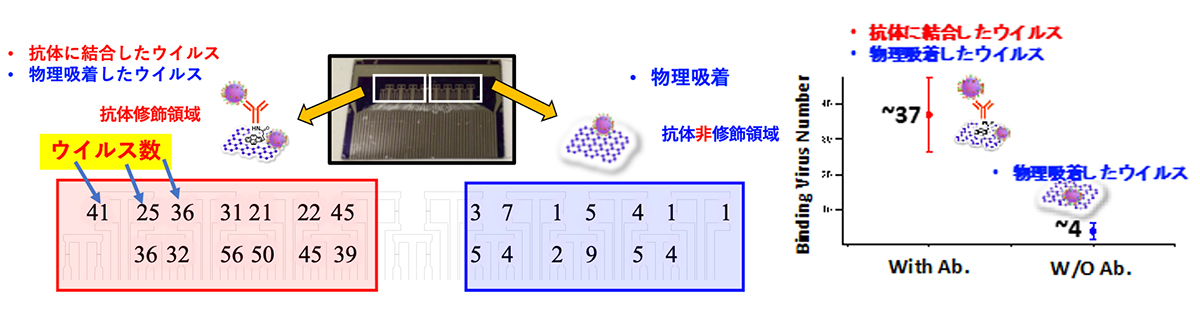
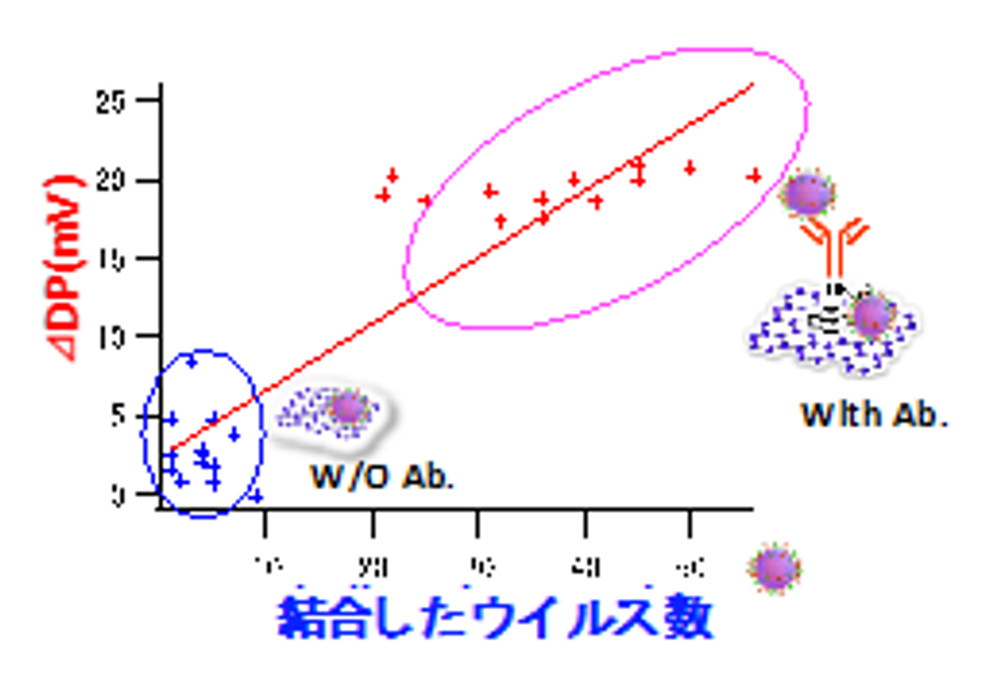 図10. 新型コロナウイルス導入による抗体修飾したFETとしないFETの結合ウイルス数とディラックポイントの変化分の関係
図10. 新型コロナウイルス導入による抗体修飾したFETとしないFETの結合ウイルス数とディラックポイントの変化分の関係
◇唾液からの簡便なウイルス検出システムの開発
新型コロナ患者の唾液から、新型コロナウイルスを検出する実験を行った。唾液の洗浄に関してマイクロ流路にPBSを流すだけで簡単に洗浄できることが判明し、実験が極めて簡単になることが判明した。患者は通常の抗原検査では陰性であり、PCRでは陽性であるとの判定結果であり、グラフェンFETバイオセンサの患者としては最適なケースである。患者の唾液をマイクロ流路つきポータブル測定装置に導入し、電気変化を検出した。唾液の洗浄はマイクロ流路を用いて0.01xPBSを導入することにより行った。グラフェンFETアレイを3分割して1)新型コロナウイルスのフル抗体、2)新型コロナウイルスのF(ab’)2抗体、3)参照とするH9N2インフルエンザ抗体を修飾する。
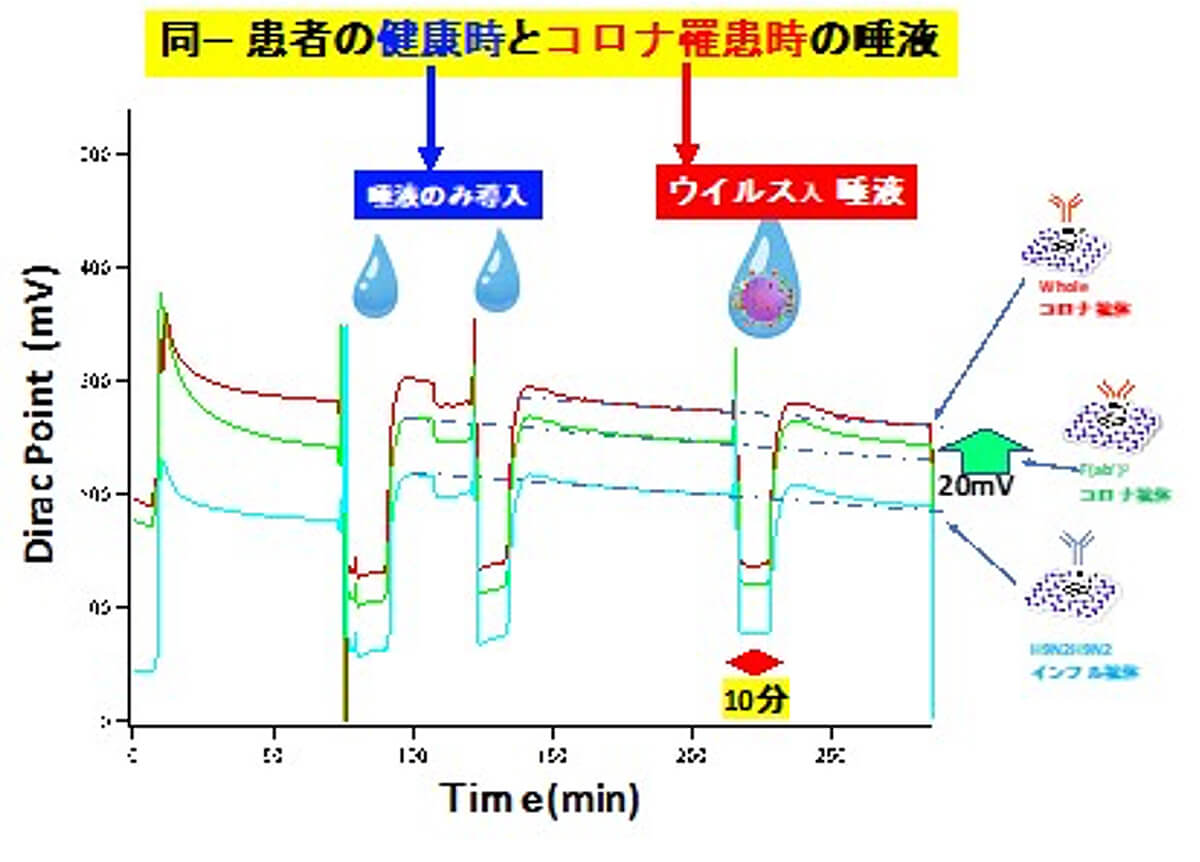
図11に示す様に、まず健康時(新型コロナウイルスを含まない)唾液を2回導入して洗浄し、その唾液導入、洗浄の影響によるディラックポイントの変化を調べたが、ほぼ無視できるほど小さな変化であった。ついで、新型コロナ感染時の患者唾液を導入して10分間待機し、その後0.01xPBSを導入して唾液を洗浄し、同時にディラックポイントの変化を測定した。その結果、参照FETのインフルエンザ抗体を修飾したグラフェンFET(空色のライン)ではウイルスの導入前後では図11に示すようにディラックポイントの変化は殆ど見られなかった。これに対して新型コロナウイルスのF(ab’)2 抗体の場合(緑色のライン)、ウイルス導入前後で〜20mVのディラックポイントの変化が見られた。これは新型コロナウイルスが新型コロナウイルスのF(ab’)2 抗体に結合したことによると考えられる。ただ現時点で不明な点は、新型コロナウイルスのフル抗体(赤色のライン)にウイルスを導入してもディラックポイントの変化がほとんど見られなかったことである。この点については今後の検討を要する。
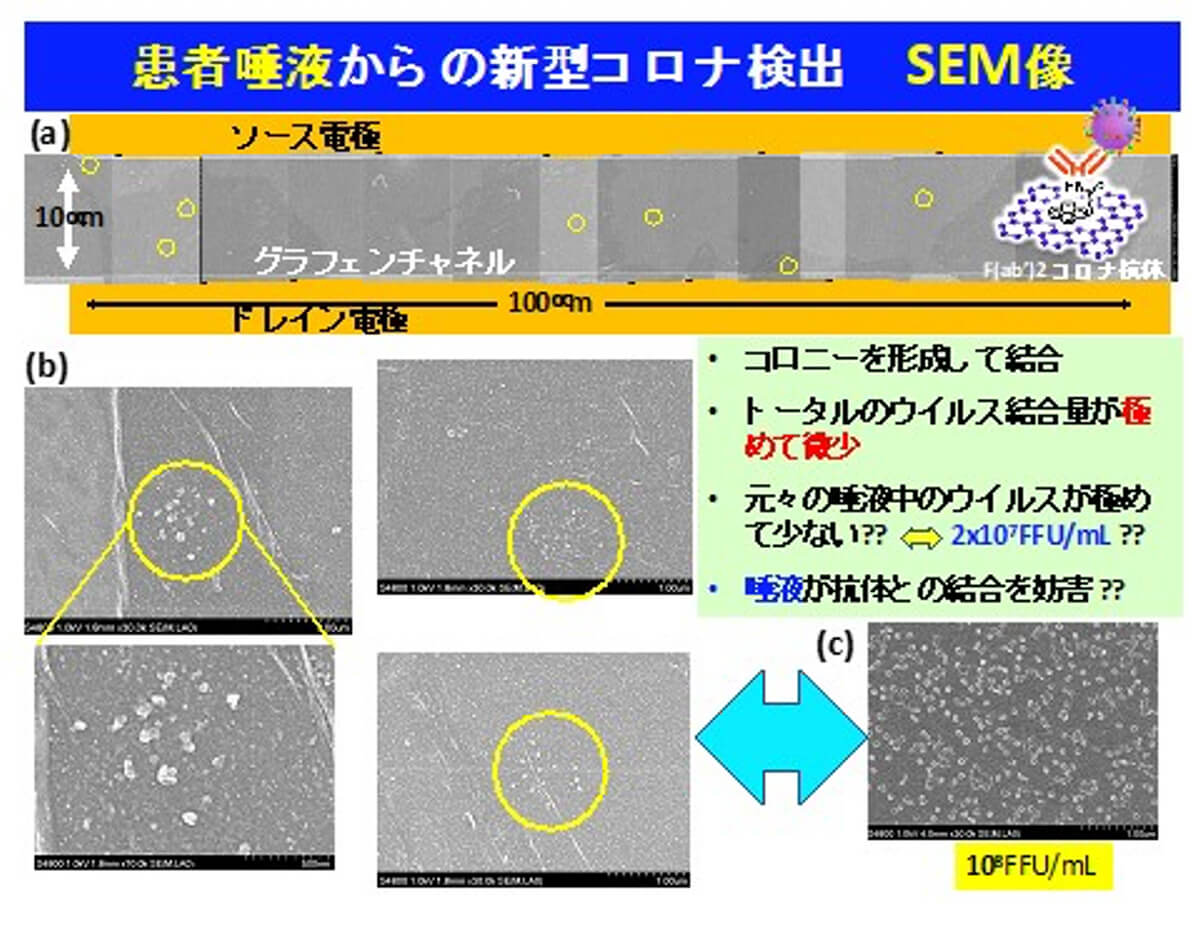
この新型コロナ患者の唾液を導入したグラフェンFET上のウイルスをSEMにより観察したものを図12に示す。図12(a)はグラフェンチャネル全体の10mx100mのSEM写真である。非常に奇妙な現象は、唾液中に含まれるウイルスが、チャネル全体に一様に分布して結合するのではなく、数個の黄色の丸印で囲まれた領域にコロニーを形成して結合する。その黄色の丸の領域を拡大したものを図12(b)に示す。ウイルスが凝集して結合していることがわかる。通常、実験室系で行うPBS中にウイルスを導入した場合は、図12(c)に示す様に一様にウイルスはグラフェン上に結合する。実際の感染患者の唾液からのウイルスはコロニーを形成して結合するという事実は極めて目新しく興味深いものである。この事実は実験室系と生態系とは微妙な差異があり、この差異を考慮に入れて研究展開を図ることが重要であると考えられる。なぜコロニーを形成するかは現時点では未解明である。
以上の結果より、マイクロ流路を用いたポータブル計測機器で患者の唾液からウイルスを検出できることがわかり、簡便に家庭でのウイルス検出を可能とした。
【著者紹介】
松本 和彦(まつもと かずひこ)
大阪大学産業科学研究所 名誉教授、特任教授
■略歴
- 昭56.3東京工業大学大学院博士課程電子物理工学専攻修了 工学博士
- 昭56.4電子技術総合研究所
電子デバイス部 固体デバイス研究室 入所 - 昭63〜平2スタンフォード大学電気工学科 客員研究員
- 平 5.7電子デバイス部 微構造エレクトロニクス研究室 室長
- 平13.4産業技術総合研究所 総括研究員
- 平15.3大阪大学 産業科学研究所 教授
- 平24.4〜26.3大阪大学 産業科学研究所副所長
- 平25.10〜大阪大学COI研究推進機構 副機構長・研究統括リーダー
- 平30.3大阪大学定年退官、名誉教授、特任教授
■受賞
- (1)平成 8年度科学技術庁長官賞 研究功績者表彰
- (2)平成 8年度国際固体素子材料コンファレンス 最優秀論文賞
- (3)平成10年度第30回 市村学術賞 功績賞
- (4)平成10年度第57回 科学技術庁 注目発明選定
- (5)平成11年度第12回 工業技術院長賞
- (6)平成13年度国際固体素子材料コンファレンス 最優秀論文賞
- (7)平成20年度応用物理学会フェロー表彰
- (8)平成23年Micro Nano Process Conference 2010 Award Outstanding Paper
- (9)平成24年Micro Nano Process Conference 2011 Award Outstanding Paper
- (10)平成25年, 26年, 27年 大阪大学総長表彰
水中インフラ維持管理の展望(2)

代表理事
佐藤 友亮
3.インフラ維持管理の例
3.1.ダム
ダムは河川法により堤高(基礎地盤から堤頂までの高さ)が15m以上であることと定義され、水位、流量観測や操作規程を定めるなど特別な義務が管理者に課せられます。管理者は主に国土交通省、農林水産省、水資源機構、地方自治体などの官公庁だが、民間企業である鉄道会社や電力会社が管理しているダムも存在する。
ダムでは治水、利水、発電と様々な目的で運用されているため設備が異なる部分もあるが、本稿では一般的に要求されることが多い設備の点検について記載する。
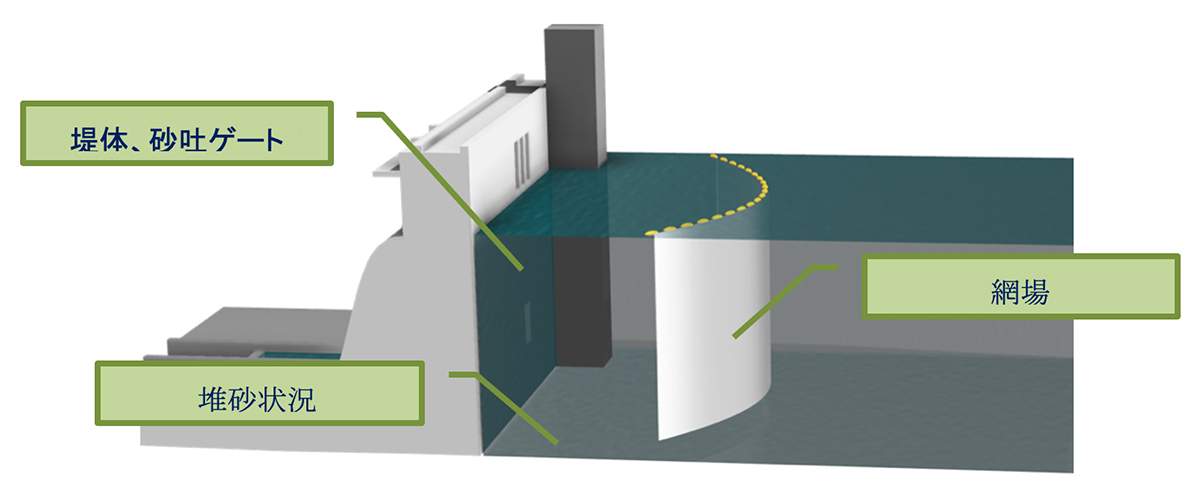
点検の要求が多いのは下図の堤体のひび割れや付着物の点検、堆砂状況の撮影、網場の現状把握である。いずれも従来は潜水士が担っていたが、現在はROVによる点検も増えてきている。ひび割れの補修などの作業を伴うものは潜水士で行う必要があるが、上記のような補修個所の特定や現状把握はROVで実施することも可能である。
3.2.水道設備
水道設備に関しては例えば水道管の法定耐用年数は40年だが、実際は1960-70年代に埋設されたものが多い。この他ポンプ場、浄水施設などの関連設備の長寿命化のために点検が求められており、具体例として下図に過去の東京都水道局の公募を示す。
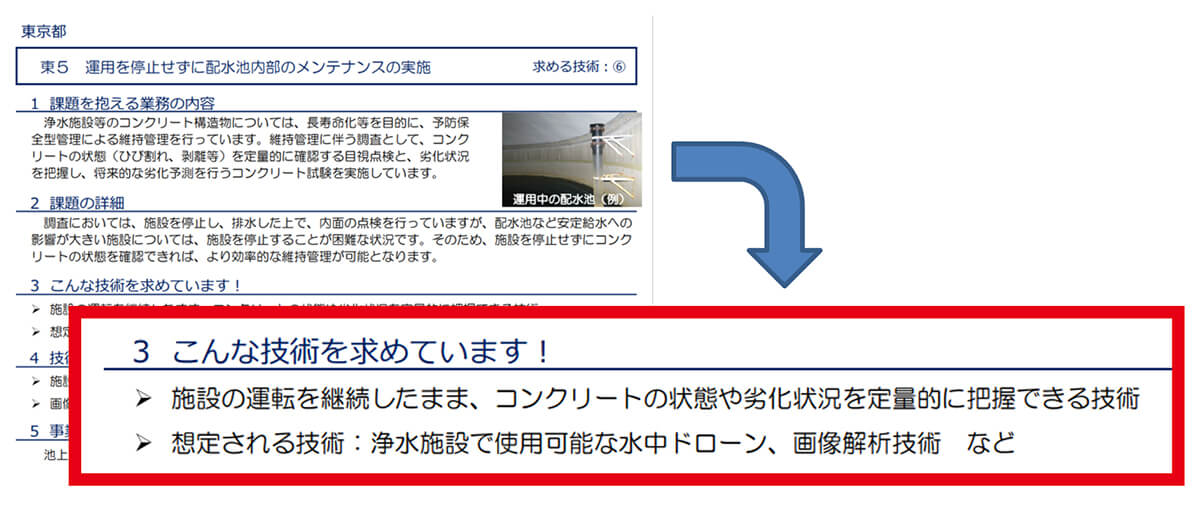
前項のダムの堤体に同じく、コンクリート構造物の劣化診断としてひび割れや剥離等を定量的に把握することを目的としており、新しい技術としてROV関連が求められている。
3.3.洋上風力発電設備
今後は国内の洋上風力発電設備が増えることが見込まれ、それに伴い調査・点検の需要が拡大すると思われる。大まかに事前調査、施工誘導、保守点検に分かれ、使用するセンサ、機材ともにそれぞれ以下のとおりである。
-
海底地形調査
・マルチビーム測深機:風車建設区域および周辺の高さ(水深)管理
-
地球物理調査
・サイドスキャンソナー:障害物(爆発物)、底質の把握
・サブボトムプロファイラ:海底下の地層構造の把握
・コーン貫入試験:海底表面の硬さの把握
・磁気探査装置:不発弾調査 -
風車施工
・USBL:SEP船のレグの位置管理
-
海底ケーブル(パイプ)敷設
・ROV:タッチダウンモニタリング
-
保守点検
・ASV、スキャニングソナー:風車周囲の地形変化、洗堀状況把握
・ROV(パイプトラッカー):パイプ位置検知、映像による現状把握
・マルチビーム測深機:ケーブル敷設断面の取得
4.ROV
ROVは様々な用途に応じてセンサの搭載や水域等の環境に適応させる必要がある。汎用性の高いROVの構造について以下の通り述べる。
構造としては全体が概ね長方形のフレームで構成されるオープンフレーム構造が推奨される。フレーム内には制御機器を収納した円筒状の圧力容器やスラスタ等が配置され、上部に浮力体が取り付けられる。特長としてはセンサやマニピュレータ等機器配置の自由度の高さ、メンテナンスの容易さが挙げられる。
スラスタの配置としては菱形配置方式(Four Vectored Horizontal Thrusters)を推奨する。ROVの前方及び後方にそれぞれ2基のスラスタを水平菱形に配置し、計4台のスラスタによって前後進、平行移動、旋回の3自由度の移動を実現している。鉛直方向は別途1基以上のスラスタを垂直方向に配置する。これによりスラスタの造る水流が機体中央部を通過しないため、高い推進効率を確保しつつ、機体中央部に他の機器を配置することを実現している。
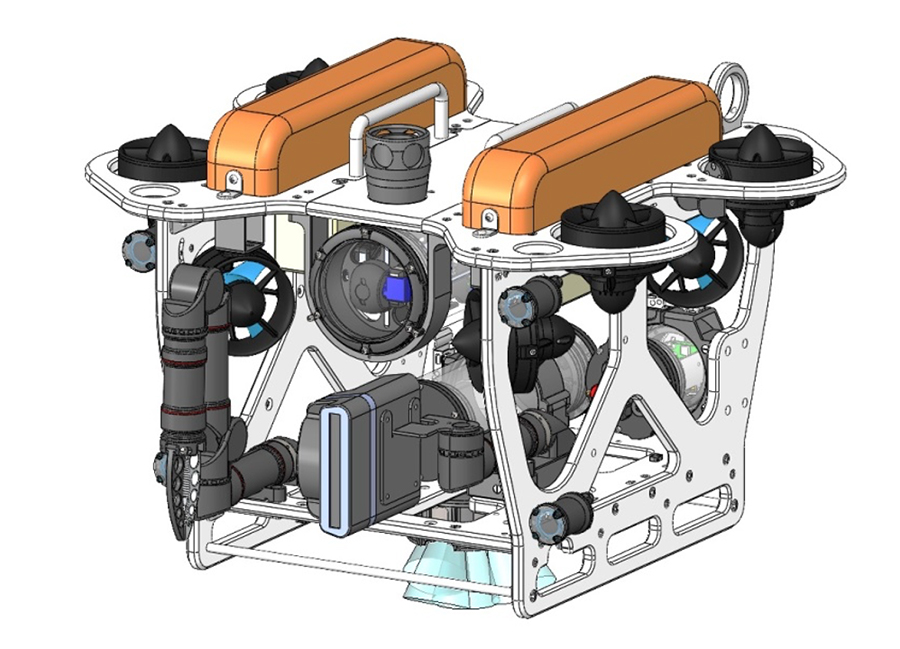
(株式会社水龍堂製ROV「龍頭」)
5.まとめ
ROVの可能性が水中インフラ維持管理という新たな用途により拡大を見せている。従来は潜水士で行っていた業務も一部ROVで代替する動きもあり、今後は我々の知らない新たな機能を搭載したROVや一部自律航行が可能なAUVに近いROVも登場することが期待される。
今後、幅広い水中調査で標準的に使用されていくことが予想されるため、新たな用途である水中インフラ維持管理とともに注目していきたい。
参考文献
- 浦環・髙川真一(1997)「海中ロボット」成山堂書店
- 佐藤友亮・高木圭太・魚谷利仁(2021)「ROV技能認定 ROV分類Class1準拠テキスト」日本ROV協会
【著者紹介】
佐藤 友亮(さとう ゆうすけ)
一般社団法人日本ROV協会 代表理事
■著者略歴
- 2011年明治大学理工学部物理学科卒業
- 2011年株式会社東陽テクニカ入社
- 2019年日本海洋株式会社入社
- 2021年一般社団法人日本ROV協会設立
- 2022年株式会社水龍堂設立
- 2024年一般社団法人日本ROV協会 代表理事就任
- 2024年株式会社UMINeCo 設立
現在に至る
オンセミのHyperluxイメージセンサ、SUBARUのAI対応の次世代「アイサイト」に採用さる

●ハイライト
・オンセミは、SUBARUの次世代アイサイトとしてステレオカメラのフロントセンシングシステム用イメージセンサの主要サプライヤに選定
・Hyperluxイメージセンサの全画素設計とハイダイナミックレンジにより、画像の鮮明度と精度を大幅に向上
・機能安全機構を備えたHyperluxイメージセンサは、システムの安全性と信頼性のレベルを向上
・この選択は、複数世代のSUBARUのステレオカメラフロントセンシングシステムに合わせて、センサを調整することで車両の安全性を向上させるという、両社間の長年にわたる協力に基づく
オンセミは19日、株式会社SUBARUの運転支援システム「アイサイト」の次世代システムにおいて、ステレオカメラフロントセンシング用イメージセンサの主要サプライヤに採用されたと発表した。この次世代システムは、将来のSUBARUの車両モデルに搭載される予定である。オンセミの先進的な Hyperluxイメージセンサ「AR0823AT」は、システムの「目」として機能し、SUBARUのステレオカメラに対応した人工知能(AI)アルゴリズムに必要とされる重要な視覚データを取得するように調整されており、より正確な運転判断を可能にし、車両全体の安全性を向上させるという。
Hyperluxイメージセンサ「AR0823AT」は、どのような照明条件においても鮮明で正確な画像を撮像する全画素設計と、アイサイトのステレオカメラの2つのセンサが同期して撮像することを可能にする特別な制御を搭載している。これは、人間の視覚を模倣するステレオビジョンシステムに不可欠で、システムが車両の進路上にある物体の奥行きや相対的なサイズ、距離を識別することを可能にする。さらに、センサのハイダイナミックレンジ(HDR)により、日が当たって明るい部分と影の部分のどちらも詳細に撮像することができ、AI 対応システムは正確な判断を行うことができる。
Hyperluxイメージセンサ「AR0823AT」は、運転支援システムの安全性と信頼性を維持するため、自動車安全度水準 (ASIL) C レベル標準に適合した機能安全機能を搭載している。これらの機能はセンサの機能を積極的に監視し、システムの精度を損なう可能性のある問題が検出された場合は、カメラをリセットしたり、運転者に警告したりするなどの対応を可能にするとのこと。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000317.000035474.html
三菱電機、衛星データを利用した温室効果ガス排出量可視化に関するパートナーシップ契約
三菱電機(株)は、(株)三菱UFJ銀行、衛星データサービス企画(株)、GHGSat Inc.(ジーエイチジーサット、以下、GHGSat社)と衛星データを利用した温室効果ガス排出量の可視化に関するパートナーシップ契約を締結した。
4社は本パートナーシップを通じて、衛星が観測した世界中の温室効果ガス排出量のデータから、観測対象ごとの傾向をモニタリングし、分析した情報を企業および自治体などのユーザー向けに提供するサービスの実現を目指す。このサービスの提供を通じて、温室効果ガス削減などの社会課題解決に貢献するという。
温室効果ガスは、地球温暖化を引き起こす気候変動の主な要因であり、地球環境への影響から排出量削減に向けた取り組みが世界的に進められている。2023年に開催された第28回国連気候変動枠組条約締約国会議(COP28)では、パリ協定の目標達成に向けた世界全体の進捗を評価するグローバル・ストックテイクの実施が初めて採択され、企業や政府、自治体は自らの温室効果ガス排出量をより正確に、統一された基準で把握する必要性が高まっている。特に産業界では、低炭素技術への転換や再生可能エネルギーの普及など、多額の投資による長期的な視点に立った戦略的な計画が必要となっている。
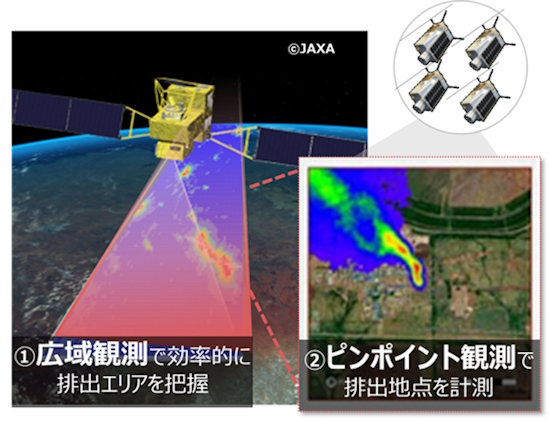
今回、4社は温室効果ガスの削減に取り組むユーザーを対象に、衛星データを利用した温室効果ガスの排出量をわかりやすく可視化するサービスの検討を進める。具体的には温室効果ガス観測技術衛星「いぶき(GOSAT)」※1シリーズ衛星の広域にわたる観測データと、GHGSat社が持つ衛星コンステレーション※2による温室効果ガスの発生源のピンポイント観測データを融合し、温室効果ガスの排出量をわかりやすく可視化したデータを提供するサービスについて検討する。継続的に温室効果ガスの排出量をモニタリングし、客観的で精度の高いデータを提供する他、エネルギーパイプラインのガス漏れなどの異常を迅速に通知し、事故を防ぐなど、安全管理にも寄与することを目指す。ユーザーは新規に設備を導入することなく、衛星データに基づく温室効果ガスの排出量を把握可能となる。また、温室効果ガス削減に向けた具体的な目標設定や効率的な進捗管理を行うことで、透明性・サステナビリティを高めることができる。
三菱電機はGOSATシリーズ衛星の開発に携わっており、現在開発中の温室効果ガス・水循環観測技術衛星(GOSAT-GW)は従来よりも広い範囲を隙間なく面的に観測可能となる予定である。本サービスの提供開始に向け、同社は、GOSAT-GWを加えたGOSATシリーズ衛星から取得した信頼性の高い観測データの処理を迅速化し、ユーザーに対しリアルタイムに情報提供するための検討を行う。加えて、多岐にわたる分野での衛星観測ソリューションサービスで得た知見を活かし、温室効果ガスの観測データに地理・空間情報などのデータを融合させることで、衛星データをわかりやすく可視化する。これらの取り組みを通じて、本パートナーシップに貢献するとのこと。
※1 環境省、JAXA、国立環境研究所による共同プロジェクトのもと開発された、二酸化炭素・メタンなどの温室効果ガスの濃度分布などを観測する衛星。GOSATは、Greenhouse gases Observing SATelliteの略
※2 多くの衛星で編隊を形成し、協調した動作をさせるシステムのこと
プレスリリースサイト(mitsubishi):https://www.mitsubishielectric.co.jp/news/2024/1115-b.html
ST、ヘルスケア・フィットネス向け次世代ウェアラブル機器を実現する革新的バイオセンサ技術

・心臓および神経系センシングの入力回路、モーション・トラッキング機能および組み込みAI機能を備えた高集積バイオセンサ
・electronica 2024(ミュンヘン、11月12日~15日)でデモを展示
STマイクロエレクトロニクスは、スマート・ウォッチ、スポーツ・バンド、スマート・リング、スマート・グラスなどの次世代ヘルスケア・ウェアラブル機器に最適なバイオセンサ「ST1VAFE3BX」を発表した。
同製品は、高精度の生体電位入力回路とSTの実績あるMEMS加速度センサおよび機械学習コア(MLC)を集積しており、チップ内でアクティビティを検出することで、消費電力を抑えつつ高い性能を実現するという。
Yole Development社のアナリストによると、ウェアラブル・モニタ機器は、保健機関により承認された市販のコンスーマ向けヘルスケア機器などを含む、一般的なヘルスケア市場を越える機会があると見ている(1)。STのチップ設計専門家により、シリコン内に集積された高精度センサ入力回路が、心拍変動や認知機能、精神状態の検知といった先進的な機能を実現し、あらゆる分野でのイノベーションを促進している。
ST1VAFE3BXは、ライフスタイル / 医療モニタリング用のインテリジェント・パッチなど、手首以外の身体部位用のウェアラブル機器の可能性を広げる。STの顧客であるBM Innovations GmbH(BMI)社とPiso
n社は、この分野の最先端を走っており、ST1VAFE3BXをいち早く採用して、新製品の開発を推進している。
BMI社は、ワイヤレス・センシング分野で豊富な実績がある電子設計企業で、最先端の心拍数 / 心機能モニタリング・システムなど、幅広いプロジェクト・ポートフォリオを有している。
ST1VAFE3BXは現在量産中で、12リードのLGAパッケージ(2 x 2mm)で提供される。STのeSToreまたは販売代理店から入手可能で、単価は1000個購入時に約1.50ドル。また、eSToreでは無償サンプルも提供されている。
STは、11月12日~15日にミュンヘン(ドイツ)で開催されるElectronica 2024に出展し、STブース(Hall C3 101)でST1VAFE3BXのセンシング技術のデモを展示する。詳細については、ウェブサイトを参照。
(https://www.st.com/content/st_com/ja/campaigns/paving-the-way-for-predictive-healthcare-mems-mcbio.html?icmp=tt41301_gl_pron_oct2024)
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000001413.000001337.html
“ものづくりの板橋”の技術が光る いたばし製品技術大賞決定

板橋区は、令和6年11月14日に開催された「第28回いたばし産業見本市」にて、「板橋製品技術大賞」の令和6年度の受賞企業に対し、表彰式を行った。
「板橋製品技術大賞」は、区内中小企業の優れた製品・技術を発掘し、広く区内外に発信することで区内産業の振興を図ることを目的として創設され、今年で22回目を迎える。
学識経験者や産業技術研究者、弁理士などの専門家が、優秀性・新規性・市場性などについて審査を行い、14の受賞製品を決定した。
◎受賞製品紹介
【令和6年度最優秀賞】
製品・技術名:ミミズ型管内走行ロボット「Sooha」(画像)
企業名:株式会社ソラリス
【令和6年度審査委員長賞】
製品・技術名:眼科検査用万能定規「COメジャー」
企業名:株式会社Square Wheel
【令和6年度優秀賞】
・「板橋産業連合会賞」
製品・技術名:世界最薄ポケッタブルスケール GRAMIL(グラミル)
企業名:株式会社タニタ
・「東京商工会議所板橋支部賞」
製品・技術名:Butterfly Fire Stand
企業名:技研株式会社
・「板橋法人会賞」
製品・技術名:AMIYUI
企業名:エスジー工業株式会社
【令和6年度医療環境改善賞】
製品・技術名:針捨てボックス 「ハリクイ 2.0L」
企業名:イワツキ株式会社
【令和6年度循環型社会貢献賞】
製品・技術名:組立Wall
企業名:株式会社志村製函所
【令和6年度審査委員賞】
製品・技術名:実体顕微鏡用蛍光アダプター OLFAS
企業名:株式会社ベックス
製品・技術名:位相シフトを利用したφ300mm大口径平面干渉計
企業名:株式会社清原光学
製品・技術名:ピンロックエックス
企業名:株式会社MARUYAMA
製品・技術名:Smart Tenken Vision
企業名:株式会社クレアビジョン
製品・技術名:フォークリフト用ツメ下げ忘れ警告センサー
企業名:マーベルオートサービス株式会社
製品・技術名:光の観察箱
企業名:オクト産業株式会社
製品・技術名:DNA分析電気泳動観察装置
企業名:株式会社バイオクラフト
プレスリリースサイト:https://www.city.itabashi.tokyo.jp/bunka/monodukuri/1048680/1054766/index.html
医薬品の発見、ゲノム科学の加速、医療機器の推進が目的のソブリン AI 機能を開発中

65 歳以上の高齢者が人口の 30% を占める日本は、質の高い医療を提供するために、医療のほぼすべての側面をサポートするソブリン AI(https://blogs.nvidia.co.jp/2024/05/10/what-is-sovereign-ai/)イニシアチブを推進している。
来年までに約 50 万人の医療従事者が不足すると予想される中、国固有のデータとローカルのコンピューティング インフラでトレーニングされた AI ツールは、日本の臨床医と研究者の能力を大幅に強化し、患者のケアを可能にする。
11 月 13 日まで東京で開催される NVIDIA AI Summit Japan では、AI で加速された創薬、ゲノム医療、医用画像処理、ヘルスケア ロボットなど、日本のヘルスケアのリーダーたちによる画期的なテクノロジ導入事例が紹介される。
これらの事例は、Tokyo-1 スーパーコンピューターなどの NVIDIA AI コンピューティング プラットフォームによって駆動し、創薬用の NVIDIA BioNeMo、医用画像処理用の NVIDIA MONAI、ゲノミクス用の NVIDIA Parabricks、ヘルスケア ロボット用の NVIDIA Holoscan などのドメイン固有のプラットフォームを使って開発されている。
◆理解、精度、スピードを 深める 創薬 AI ファクトリー
NVIDIA は、世界三大製薬市場の一つである日本の医薬品市場を、創薬研究者が生体分子データから生物学的なインテリジェンスを生成するための AI モデルを開発、展開できるエンドツーエンド プラットフォームである NVIDIA BioNeMo でサポートしている。
BioNeMo には、カスタマイズ可能なモジュール式プログラミング フレームワークと、最適化された AI 推論のための NVIDIA NIM マイクロサービスが含まれている。新しいモデルには、タンパク質と相互作用する分子の 3D 構造を予測する DiffDock などのモデルが含まれる。
このプラットフォームはバイオ分子 AI モデルをエンタープライズ グレードのアプリケーションに拡張する開発者を支援する、カスタマイズ可能なリファレンス AI ワークフローのカタログである BioNeMo Blueprint も備えている。
AlphaFold2の NIM マイクロサービスは、従来の AlphaFold2 パイプラインを 5 倍加速する進化的情報検索ツールである MMSeqs2-GPU を統合している。ソウル国立大学、ヨハネス グーテンベルク大学マインツ校、NVIDIA の研究者が主導するこのツールの統合により、40 分かかるタンパク質構造予測が 8 分で可能になる。
AI Summit Japan では、AI ネイティブの科学データセットを提供する TetraScience が、NVIDIA との提携を発表した。この提携により、ライフサイエンス バリュー チェーン全体にわたってワークフローを加速、改善する科学的 AI ユースケースの生産を産業化する。
例えば、ワクチンやモノクローナル抗体などの生物製剤を生成するための最適な細胞株の選定は、重要ではあるものの時間がかかるプロセスである。TetraScience の新しい Lead Clone Assistant は、NVIDIA VISTA-2D 基盤モデルによる細胞セグメンテーションや Geneforme rモデルによる遺伝子発現分析を含む BioNeMo ツールを活用し、リードクローン選定を数週間から数時間に短縮する。
東京を拠点とするアステラス製薬は、ESM-1nv、ESM-2nv、DNABERT などの BioNeMo 生体分子 AI モデルを使用して、生物製剤研究を加速している。BioNeMo の AI モデルは、新しい分子構造を生成し、それらの分子が標的タンパク質とどのように反応するかを予測し、標的タンパク質に効果的に結合するように最適化するために使用されている。
BioNeMo フレームワークを使用することで、アステラス製薬は化学分子生成を 30 倍以上加速した。同社は、BioNeMo NIM マイクロサービスを使用して、研究をさらに進めていく予定である。
◆日本の製薬企業と研究機関が医薬品研究開発を推進
アステラス製薬、第一三共や小野薬品工業などの製薬会社は、日本のコングロマリットである三井物産子会社のゼウレカが構築した NVIDIA DGXAI スーパーコンピューターである Tokyo-1 システムを活用している日本の大手製薬会社。アステラス製薬は Tokyo-1 を活用して AI モデル開発と分子シミュレーションを加速させている。
ゼウレカは、Tokyo-1 システムを使用して、製薬会社が独自のデータセットを保護しながら大規模な AI モデルのトレーニングで協力する能力を高めるためのコンフィデンシャル コンピューティングの適用を研究している。
疾患と精密医療の研究をさらに支援するために、日本全国のゲノム研究者が NVIDIA Parabricks ソフトウェア スイートを採用し、DNA および RNA データの二次分析を加速している。
その中には、がん研究に焦点を当てた政府主導の全ゲノム プロジェクトに取り組んでいる主要な学術機関である国立大学法人東京大学医科学研究所 ヒトゲノム解析センターがある。この取り組みは、研究者が日本の人口に固有の遺伝子変異を特定し、精密治療の開発を支援するのに役立つと見込まれている。
同ゲノムセンターは、カリフォルニア大学サンタクルーズ校のゲノム研究所の研究者によって開発されたツールである Giraffe の使用を検討している。現在 Parabricks v4.4 で利用できる Giraffe を使用すると、研究者はゲノム配列をパンゲノム (多様な人口を表す参照ゲノム) にマッピング可能となる。
◆AI が内視鏡医や外科医にリアルタイムの能力をもたらす
日本のヘルスケア イノベーターは、内視鏡医と外科医をサポートする AI 拡張システムを構築中である。
富士フイルムは NVIDIA と連携して、手術を効率的にするための AI アプリケーションを開発した。
このアプリケーションは、NVIDIA DGX システムを使用して開発された AI モデルを用いて、CT 画像を 3D シミュレーションに変換し、手術をサポートする。
オリンパスは最近、NVIDIA および日本の通信会社 NTT と連携し、クラウド接続された内視鏡が画像処理や AI アプリケーションをリアルタイムで効率的に実行できることを実証した。内視鏡にはエッジ コンピューティング用の NVIDIA Jetson Orin モジュールが搭載され、NTT 通信プラットフォームの IOWN オールフォトニクス・ネットワークを使用してクラウドサーバーに接続された。IOWN オールフォトニクス・ネットワークは、ネットワーク全体にフォトニクス(光)ベースの技術を導入し、低消費電力、高速大容量、低遅延伝送を可能にする。
NVIDIA はまた、リアルタイムの洞察を得るために AI モデルとアプリケーションの開発を効率化するセンサー処理プラットフォームである Holoscan により、日本の放射線科および外科手術用のリアルタイム AI 搭載ロボット システムをサポートしている。Holoscan には、内視鏡検査や超音波分析などのアプリケーション用の AI リファレンス ワークフローのカタログが含まれている。
日本中に複数のキャンパスを持つ医科大学である昭和大学の脳神経外科医は、Holoscan と産業グレードのエッジ AI 用の NVIDIA IGX プラットフォームを採用し、手術用スコープからのビデオを AI を使用してリアルタイムで 3D 画像に変換する手術顕微鏡アプリケーションを開発した。3D 再構成により、外科医は脳の腫瘍や重要な構造をより簡単に特定し、手術の効率を向上させることができる。
AI メディカルサービス (AIM)、アナウト、iMed Technologies 、Jmees 含む日本の内視鏡や外科用 AI 企業は、内視鏡医や外科医に診断支援を提供するアプリケーションに Holoscan を使用することを検討している。これらのアプリケーションは、臓器などの解剖学的構造をリアルタイムで検出、傷害のリスクを低減、消化器がんや脳卒中などの状態を特定し、医師が手術の準備や実施を行うのに役立つ洞察を即座に提供することが期待される。
◆デジタル ヘルス エージェントによるヘルスケアの拡大
高齢者は慢性疾患の割合が高く、ヘルスケア サービスの利用が最も多いため、高齢化社会に対応するため、日本を拠点とする企業は患者ケアを強化するデジタル ヘルス システムの開発の最前線に立っている。
富士フイルムは、AI 強化医療検査を備えた健康診断センターのグループである NURA を立ち上げた。これは、医師ががんや慢性疾患を検査するのに役立つよう設計されたもので、検査の迅速化と CT スキャンの放射線量の低減が図られている。
NVIDIA DGX システムを使用して開発されたこのツールには、医療画像のテキスト要約を作成する大規模言語モデルが組み込まれている。今後、NVIDIA MONAI、NeMo、NIM マイクロサービスを活用することも検討している。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000487.000012662.html
オンセミ、最先端のアナログおよびミックスドシグナル・プラットフォーム
ハイライト
● Treoプラットフォームは、65nmノード上にBCDプロセス技術で構築され、業界で最も広い1~90Vの電圧範囲と最高175℃の動作温度をサポート。
● このプラットフォームにより、自動車、医療、産業、AIデータセンタ市場向けソリューションの設計プロセスの簡素化、システムコストの削減、市場投入までの時間短縮が可能に。
● 電圧トランスレータ、超低消費電力AFE、LDO、超音波センサ、マルチフェーズコントローラ、シングルペア・イーサネットコントローラなど、Treoプラットフォーム上に構築された複数の製品ファミリが、すでにサンプル出荷中。
● このプラットフォームで構築される製品は、オンセミの米国ニューヨーク州イーストフィッシュキルにある世界クラスの300mmファブで製造。
オンセミは、先進の65nmノード上にバイポーラCMOS-DMOS(BCD)プロセス技術で構築した、アナログおよびミックスドシグナル・プラットフォームのTreoプラットフォームを発表した。
このプラットフォームは、高性能・低消費電力センシング、高効率パワーマネジメント、専用通信デバイスなど、オンセミの幅広いパワーおよびセンシングソリューションの基盤を提供する。この単一のスケーラブルなソリューションを使用することで、既存のアプリケーション向け製品開発の簡素化および迅速化が可能になり、新たな市場機会に迅速に対応できるという。
今日の自動車、産業、AIデータセンタ市場における電力需要の増加は、環境規制の厳格化の中で、エネルギー効率向上の必要性を一層高めている。同時に、これらの業界ではエンドアプリケーションにおいてより高い性能と機能が期待されている。また、医療用ウェアラブルなどの低消費電力機器は、一段と洗練されつつあり、パーソナルケアの向上と機器コスト削減のために、より高いインテリジェンスと効率が求められる。このため、より高いインテリジェンスを提供すると同時に、パワースペクトル全体にわたって高いエネルギー効率を実現できる、高度に統合された先進のパワーおよびセンシングソリューションに対するニーズが生まれている。
Treoプラットフォームは、先進ノードに対して業界で最も広い電圧範囲をサポートしながら、優れた性能と機能を提供するニーズの高まりに対応する、独自の位置づけにある。Treoプラットフォーム上で構築された製品は、精度、性能、効率を大幅に向上させることで、機能、安全性、全体的な生活の質の向上をもたらす。例えば次のような事例が挙げられる。
● 自動車分野では、高性能の超音波センサによって精度を2倍向上させることができる。このことはパークアシストアプリケーションで、従来よりもはるかに車両に近い物体を検出できることを意味する。パークアシストシステムは、より近い距離にある物体を検出できるため、優れた衝突回避を実現し、運転者が駐車時に障害物を効果的に回避するのを支援して、全体的な安全性を向上させることができる。
● ヘルスケア分野では、持続血糖測定(CGM)装置用の超低消費電力アナログフロントエンド(AFE)が、ナノアンペア(nA)レベルまでの非常に小さな電流をより正確に測定できる。この精度は、グルコースセンサから発生する微小信号を検出し、正確なグルコース測定値を取得するために、きわめて重要である。複数の機能を1つの小型チップに統合することで、このプラットフォームは必要なフットプリントを半分に削減し、バッテリ寿命を数週間に延長することができる。すなわち、CGM装置全体の小型化、より快適な装着と交換回数の削減によって、医療費を節約することができる。
● データセンタ分野では、よりコンパクトなオンセミのスマートパワーステージを可能にし、GPUやCPUへの電力供給の効率向上に貢献する。これにより、冷却要件が緩和され、エネルギーが大幅に節約されるため、運用コストの削減と、より小形で持続可能な環境フットプリントを実現する。
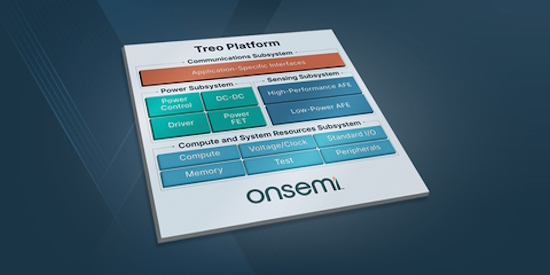
Treoプラットフォームは、コンピュート、パワーマネジメント、センシング、通信の各サブシステムを構成し、絶えず進化を続ける堅牢なIPビルディングブロック群を備えた、モジュール式のSoCのようなアーキテクチャを特徴としている。Treoプラットフォームは、65nmプロセスノード上に構築され、高度なデジタル処理能力と優れたアナログIP性能を提供する。これらの機能により、柔軟なコンフィギュレーションを可能にするローカルインテリジェンスとコンピュートを提供し、同時にエンドアプリケーションの性能と精度を大幅に向上させることができる。さらに、このプラットフォームは、業界で最も広い1~90Vの電圧範囲と最高175℃の動作温度をサポートしており、低電力から高電力まで幅広い機能を統合することができる。これにより、オンセミは特定ソリューションに対して最適化され、カスタマイズされた製品ポートフォリオを提供できるため、お客様は従来よりも迅速に製品を市場投入できるようになる。
Treoプラットフォーム上で構築された、電圧トランスレータ、超低消費電力AFE、LDO、超音波センサ、マルチフェーズコントローラ、シングルペア・イーサネットコントローラなどの初期製品ファミリは、現在サンプル出荷中とのこと。
プレスリリースサイト:https://prtimes.jp/main/html/rd/p/000000316.000035474.html
NITE、自動車の慣性測定装置を校正する事業者を初認定

独立行政法人製品評価技術基盤機構〔NITE(ナイト)〕は、2024年11月11日、トヨタテクニカルディベロップメント(株)を、国際規格ISO/IEC 17025[1]に適合する“慣性測定装置”[2]の校正事業者として国内で初めて認定[3]した。
慣性センサ[2] は、自動車分野では横滑り防止装置等に搭載され、車体の制御に用いられている。人や自動車の道路への突然の飛び出しを自動で回避する等の自動運転技術の実現には、より高度な車体の制御が必要となり、慣性センサの正確さが求められるため、その評価を行う標準器となる“慣性測定装置”が示す角速度等の正確さが鍵となる。
今回NITEが同社を国内で認定したことにより、国内自動車メーカーは、国際的に信頼性の高い校正事業者による校正を国内で受けることが可能となり、自動運転技術の開発が促進されることが期待できるという。
[1] 試験所及び校正機関の能力に関する一般要求事項。ISO/IEC 17025の詳細は、以下Webページ参照。
https://www.nite.go.jp/iajapan/aboutus/ippan/iso17025.html
[2] 慣性測定装置、慣性センサ(IMU:Inertial Measurement Unit)とは、3次元の慣性運動を検出する装置。角速度と加速度を高精度に計測し、計測結果を利用することで、人やモノの運動状態や姿勢を測定することができる。
[3] NITEは、製品評価技術基盤機構認定制度(ASNITE)において、ISO/IEC 17025に基づく校正事業者の認定を行っている。詳細は以下Webページ参照。
https://www.nite.go.jp/iajapan/asnite/outline/index.html
プレスリリースサイト:https://kyodonewsprwire.jp/press/release/202411069426/html
「石垣市における自動運転の 実証・実装に向けた調査事業」を開始

沖縄県石垣市、西日本電信電話(株)〔以下、NTT西日本〕、NTTビジネスソリューションズ(株)、東運輸(株)は、「石垣市における自動運転社会実装推進事業コンソーシアム協定」を締結し、令和6年度「地域公共交通確保維持改善事業費補助金(自動運転社会実装推進事業、以下「本事業」という。)」に応募し、採択された。
そしてこの度、4者は、本コンソーシアム協定に基づき、自動運転EVバスの(株)マクニカとともに、石垣市における「地域住民向けの持続的な交通手段の維持」や「観光客向けの二次交通手段の拡充」という地域課題の解決に向けて、2024年11月12日(火)から11月16日(土)まで、「石垣市における自動運転の実証・実装に向けた調査事業」を実施するとのこと。
1.背景・目的
少子高齢化による労働力不足や2024年問題等により、地域交通の維持や交通機関のドライバー不足等に関する社会課題が深刻化している。それらの社会課題の解決策として、自動運転等のモビリティ技術を活用した持続可能な公共交通・物流の実現が急務な状況である。こうした社会課題の解決策として、自動運転等のモビリティ技術を活用した持続可能な公共交通・物流の実現が急務な状況であり、国においては、2025年度までに50か所以上、2027年度までに100か所以上の政府目標を掲げ、取り組みが進められている。
また石垣市では、将来的な人口減少や少子高齢化、南ぬ浜へ寄港するクルーズ船増便をはじめとする観光客数の増加等、石垣市を取り巻く社会情勢は変化しており、地域社会の更なる活性化に向けて、「地域住民向けの持続的な地域交通手段の維持」および「観光客向けの二次交通手段の拡充」が主要な課題となっている。
こうした地域課題に対して、5者が自動運転分野で包括的な連携と協力関係を築き、それぞれが有する人的・物的資源を連携することで、地域の課題に適切に対応し、協働で事業を推進することにより、活力ある地域社会の形成・発展及び市民サービスの向上をめざす。
2.調査事業の概要
本事業では、自動運転レベル4による通年運行の早期実現に向けて、自動運転の安全性を確認・検証するため、以下3点を調査事業として実施する。
①実証走行ルート(公道)上での自動運転モビリティの走行実証、実証走行ルート上の危険箇所の確認および対策として、リスクアナリシスの実施
②周囲の物体との位置関係を正確に判断するため、高精度センサでのデータの取得および高精度3Dマップの作成
③道路交通法や地域住民のみなさまのご要望を踏まえたルート情報の作成
(1)実証期間
2024年11月12日(火)から2024年11月16日(土)まで
(2)実施場所
沖縄県石垣市
(ユーグレナ石垣港離島ターミナル~南ぬ浜町緑地公園~石垣港新港地区旅客船ターミナル間を走行)
(3)使用車両および自動運転技術
新型EVバス車両NAVYA EVO
レベル2自動運転システム対応
乗車定員12人(実証実験時 乗車人数:10人<乗客数:8人(運転手・保安員除く)>)
速度19km/h
EV(最大走行9時間、走行距離100㎞)
プレスリリースサイト(nttbizsol):https://www.nttbizsol.jp/newsrelease/202411111100001098.html