海中観測実装工学研究センター
特任助教 松田 匠未

海中観測実装工学研究センター
准教授 巻 俊宏
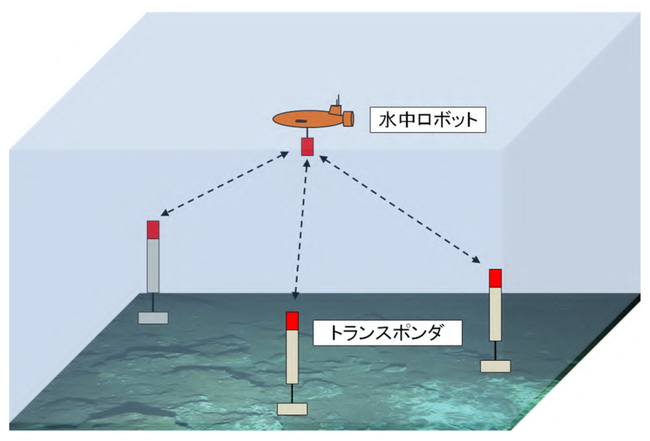
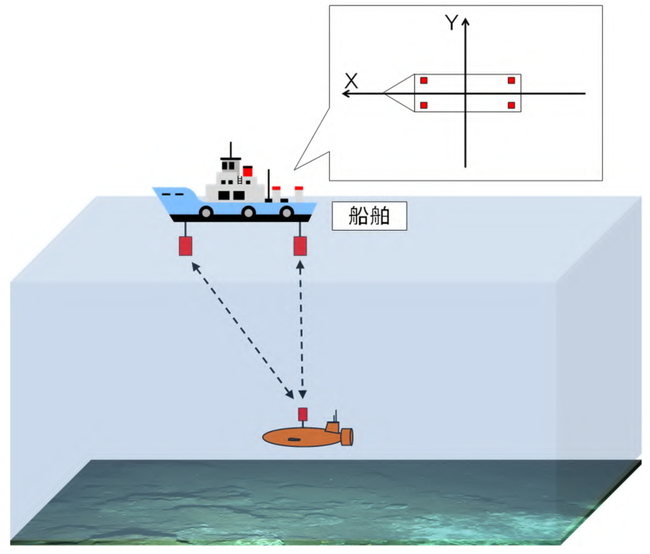
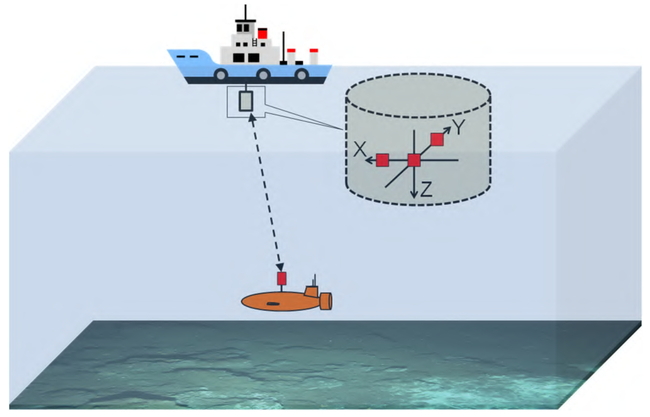
他にも音響発信・受信器を用いた測位方法がある。トランスポンダと呼ばれる特定の信号を受信すると一定時間後に応答する装置を用いる。音響信号を発信してからトランスポンダの応答信号を受信するまでの時間からトランスポンダまでの距離を計算できる。また複数の受波器によって応答信号の時間差からトランスポンダの方向を検出できる。トランスポンダを用いて、GPSで位置を計測できる水上船舶や正確に位置を把握している海底基準局などを座標基準として、それに対して相対的に座標を求めることができる。受波器間の距離(「ベースライン」と呼ぶ)に応じてLBL(Long Base Line)、SBL(Short Base Line)、SSBL(Super Short Base Line)の3つの方式がある。図2のように海底に複数のトランスポンダを設置する場合はLBL方式であり、図3のように船舶に複数の受波器を設置して、水中のトランスポンダの位置を計測する場合はSBL方式である。また図4のように波長と同程度の非常に短い間隔で設置された受波器アレイを用いる場合はSSBL方式と呼ぶ。LBL方式はベースラインが長くとれるので正確な測位が可能であるが、トランスポンダの設置位置の精度が測位精度を左右するため、設置時に正確な位置決めが要求される。SBL方式はLBL方式のような設置位置の事前計測は不要である。またSSBL方式の場合はさらにベースラインが短くなるため、装置の設置が容易になる。SBL方式とSSBL方式ではベースラインが短いため、トランスポンダとの距離が離れると測位誤差が増加するという欠点がある。
また上記のセンサ以外にも高級な慣性航法装置(INS:Inertial Navigation System、図5)やドップラ式対地速度計(DVL:Doppler Velocity Log)を組み合わせれば、長期間にわたり高精度に測位することができる。INSはセンサ自身にかかる力を高精度に計測することで測位する装置であり、DVLは海底に音響ビームを照射して、反射波のドップラシフトを検出することで海底に対する速度を計測する装置である。これらは現在の水中ロボットの標準的な測位手法となっているが、1千万円以上のコストがかかり、また物理的なサイズや重量、消費電力も大きいという欠点もある。INSは電源を入れるたびに計測誤差を補正するキャリブレーションという手続きも必要で、空のドローンのように手軽には導入できない。
次週に続く-
【著者略歴】
松田 匠未(まつだ たくみ)
2012年3月 東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 修士課程修了 修士(環境学)
2012年4月~2015年3月 日本学術振興会 特別研究員
2015年3月 東京大学大学院 新領域創成科学研究科 海洋技術環境学専攻 博士課程修了 博士(環境学)
2015年4月~2019年3月 東京大学生産技術研究所 特任研究員
2019年4月 東京大学生産技術研究所 特任助教
現在に至る
・所属学会
IEEE,日本船舶海洋工学会,海洋調査技術学会,日本ロボット学会
・受賞歴
2011年 MTS/IEEE OCEANS 2011 KONA Student Poster Program Second Place Awards
2014年 IEEE OES Japan Chapter Young Researcher Award 2014
・専門分野
知能ロボティクス,フィールドロボティクス,自律型海中ロボット(AUV),マルチロボットシステム,確率ロボティクス
巻 俊宏(まき としひろ)
東京大学生産技術研究所 准教授。
2003年東京大学工学部システム創成学科卒業。
2005年東京大学大学院工学系研究科環境海洋工学専攻修士課程修了、修士(工学)。
2008年東京大学大学院工学系研究科環境海洋工学専攻博士課程修了、博士(工学)。
同年4月東京大学生産技術研究所助教、同年10月〜12月ウッズホール海洋研究所(米国)客員研究員を経て、2010年4月より現職。
専門は海中プラットフォームシステム学。海のフロンティアを拓く岡村健二賞等を受賞。
IEEE, 船舶海洋工学会等の会員。