
代表理事
佐藤 友亮
3.インフラ維持管理の例
3.1.ダム
ダムは河川法により堤高(基礎地盤から堤頂までの高さ)が15m以上であることと定義され、水位、流量観測や操作規程を定めるなど特別な義務が管理者に課せられます。管理者は主に国土交通省、農林水産省、水資源機構、地方自治体などの官公庁だが、民間企業である鉄道会社や電力会社が管理しているダムも存在する。
ダムでは治水、利水、発電と様々な目的で運用されているため設備が異なる部分もあるが、本稿では一般的に要求されることが多い設備の点検について記載する。
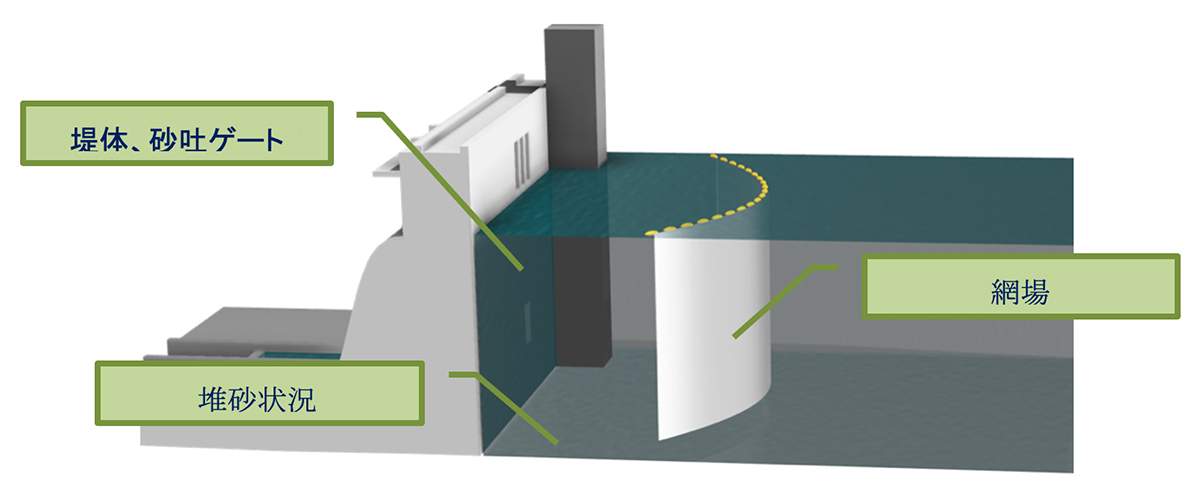
点検の要求が多いのは下図の堤体のひび割れや付着物の点検、堆砂状況の撮影、網場の現状把握である。いずれも従来は潜水士が担っていたが、現在はROVによる点検も増えてきている。ひび割れの補修などの作業を伴うものは潜水士で行う必要があるが、上記のような補修個所の特定や現状把握はROVで実施することも可能である。
3.2.水道設備
水道設備に関しては例えば水道管の法定耐用年数は40年だが、実際は1960-70年代に埋設されたものが多い。この他ポンプ場、浄水施設などの関連設備の長寿命化のために点検が求められており、具体例として下図に過去の東京都水道局の公募を示す。
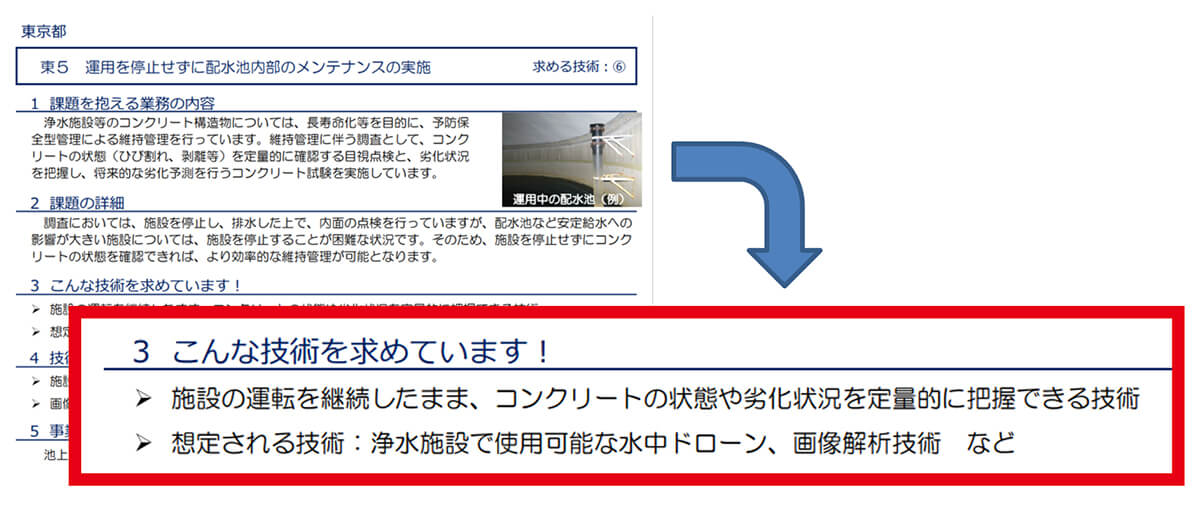
前項のダムの堤体に同じく、コンクリート構造物の劣化診断としてひび割れや剥離等を定量的に把握することを目的としており、新しい技術としてROV関連が求められている。
3.3.洋上風力発電設備
今後は国内の洋上風力発電設備が増えることが見込まれ、それに伴い調査・点検の需要が拡大すると思われる。大まかに事前調査、施工誘導、保守点検に分かれ、使用するセンサ、機材ともにそれぞれ以下のとおりである。
-
海底地形調査
・マルチビーム測深機:風車建設区域および周辺の高さ(水深)管理
-
地球物理調査
・サイドスキャンソナー:障害物(爆発物)、底質の把握
・サブボトムプロファイラ:海底下の地層構造の把握
・コーン貫入試験:海底表面の硬さの把握
・磁気探査装置:不発弾調査 -
風車施工
・USBL:SEP船のレグの位置管理
-
海底ケーブル(パイプ)敷設
・ROV:タッチダウンモニタリング
-
保守点検
・ASV、スキャニングソナー:風車周囲の地形変化、洗堀状況把握
・ROV(パイプトラッカー):パイプ位置検知、映像による現状把握
・マルチビーム測深機:ケーブル敷設断面の取得
4.ROV
ROVは様々な用途に応じてセンサの搭載や水域等の環境に適応させる必要がある。汎用性の高いROVの構造について以下の通り述べる。
構造としては全体が概ね長方形のフレームで構成されるオープンフレーム構造が推奨される。フレーム内には制御機器を収納した円筒状の圧力容器やスラスタ等が配置され、上部に浮力体が取り付けられる。特長としてはセンサやマニピュレータ等機器配置の自由度の高さ、メンテナンスの容易さが挙げられる。
スラスタの配置としては菱形配置方式(Four Vectored Horizontal Thrusters)を推奨する。ROVの前方及び後方にそれぞれ2基のスラスタを水平菱形に配置し、計4台のスラスタによって前後進、平行移動、旋回の3自由度の移動を実現している。鉛直方向は別途1基以上のスラスタを垂直方向に配置する。これによりスラスタの造る水流が機体中央部を通過しないため、高い推進効率を確保しつつ、機体中央部に他の機器を配置することを実現している。
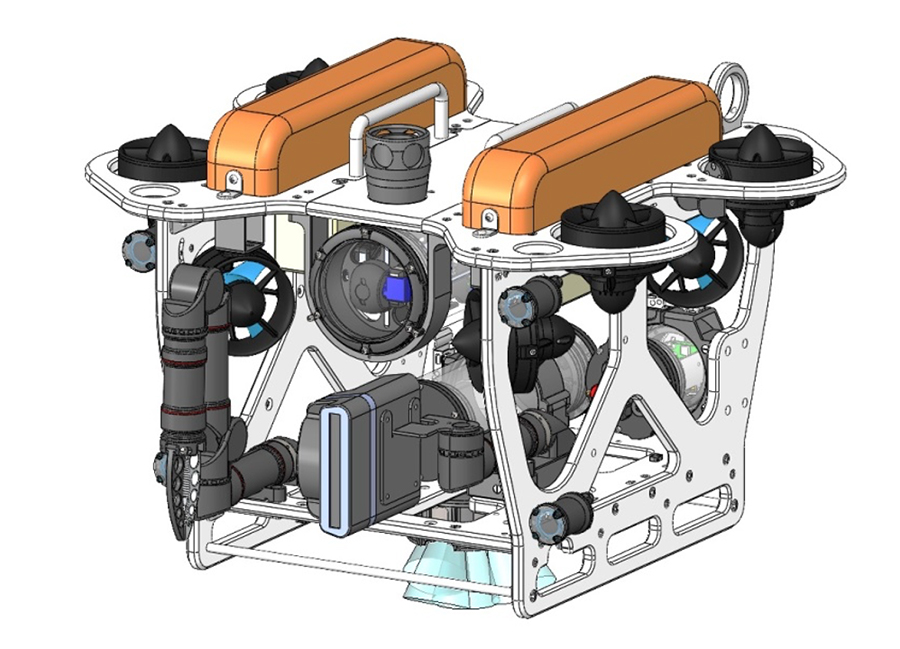
(株式会社水龍堂製ROV「龍頭」)
5.まとめ
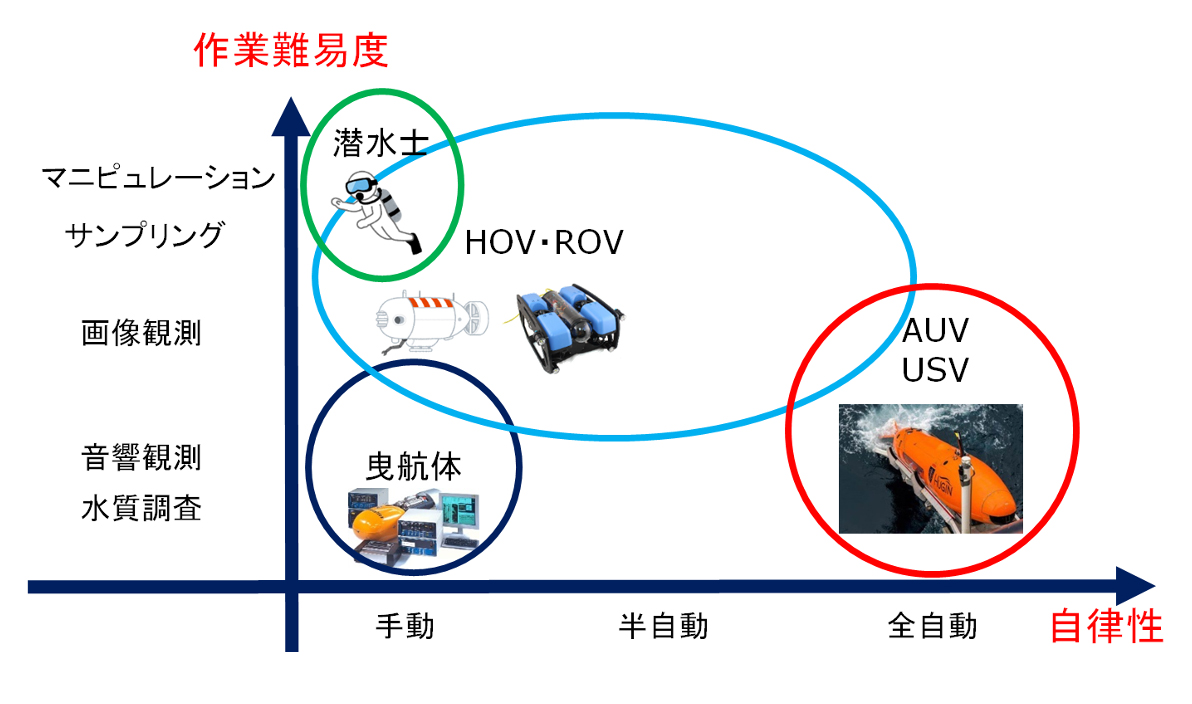
ROVの可能性が水中インフラ維持管理という新たな用途により拡大を見せている。従来は潜水士で行っていた業務も一部ROVで代替する動きもあり、今後は我々の知らない新たな機能を搭載したROVや一部自律航行が可能なAUVに近いROVも登場することが期待される。
今後、幅広い水中調査で標準的に使用されていくことが予想されるため、新たな用途である水中インフラ維持管理とともに注目していきたい。
参考文献
- 浦環・髙川真一(1997)「海中ロボット」成山堂書店
- 佐藤友亮・高木圭太・魚谷利仁(2021)「ROV技能認定 ROV分類Class1準拠テキスト」日本ROV協会
【著者紹介】
佐藤 友亮(さとう ゆうすけ)
一般社団法人日本ROV協会 代表理事
■著者略歴
- 2011年明治大学理工学部物理学科卒業
- 2011年株式会社東陽テクニカ入社
- 2019年日本海洋株式会社入社
- 2021年一般社団法人日本ROV協会設立
- 2022年株式会社水龍堂設立
- 2024年一般社団法人日本ROV協会 代表理事就任
- 2024年株式会社UMINeCo 設立
現在に至る