
大学院生命体工学研究科
准教授
西田 祐也
1.研究室の概要
九州工業大学の西田研究室では「高知能フィールドロボットの創出と社会実装」というテーマのもと,ただ水中で動作するのではなく,社会やユーザに貢献できるデータが取得可能な水中ロボットやセンサの開発を行っている.最近では手振れ機能がついた防水カメラや高性能な運動制御が実装された水中ドローンなどが普及し,それらを使った調査が積極的に行われている.しかし,海は場所や時間によって環境が大きく変化するため,一般的に普及している水中機器では変化に対応できず,有用なデータが取れない場面が数多くある.本研究室では,水や海に携わる事業者や自治体からのニーズをもとに,実環境に適応した実用的な水中機器やAIなどの最新の技術を取り組んだ機器,効率的なデータ処理手法の開発に取り組んでいる.
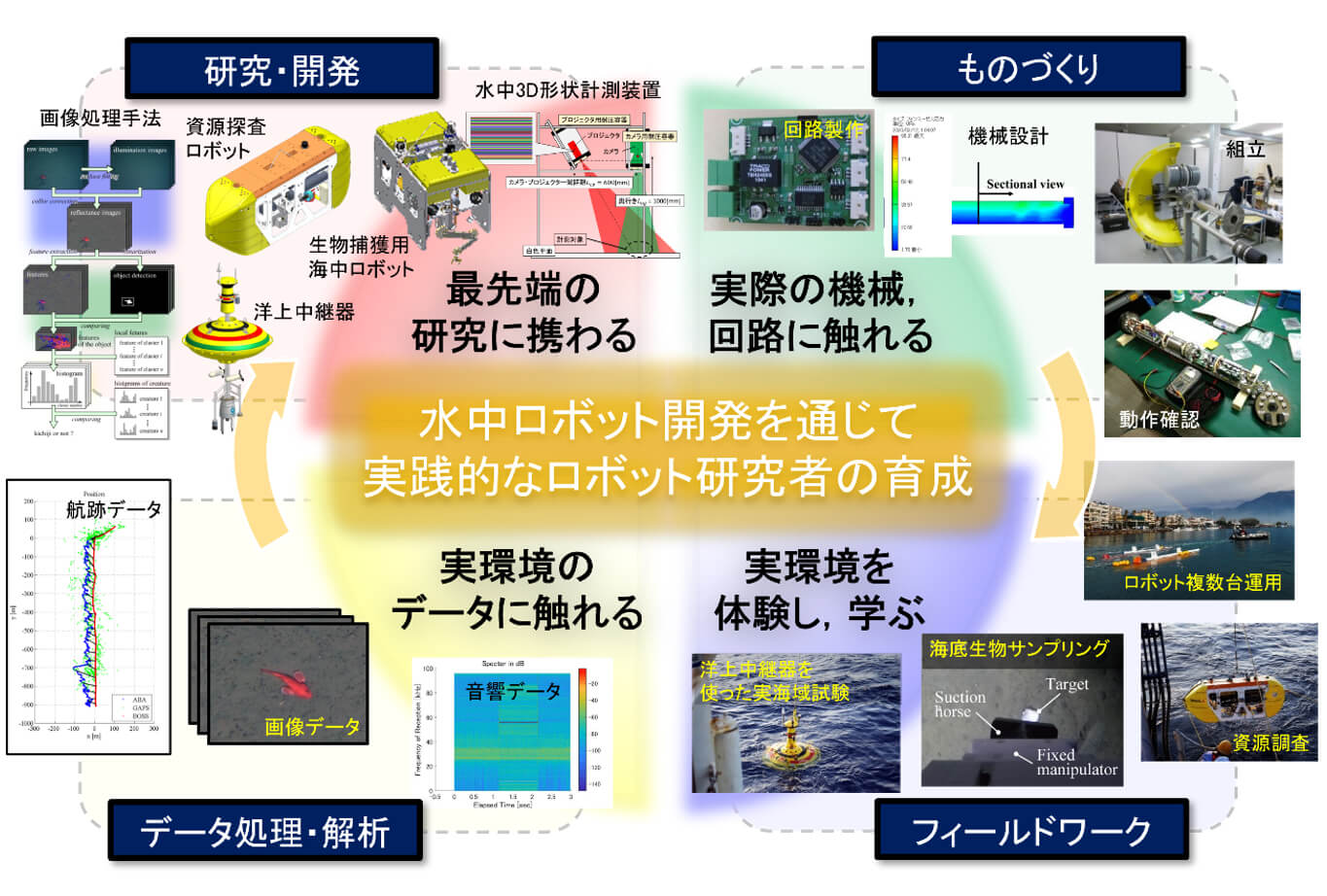
社会に多くの実用的な水中ロボットを普及させるには,水中機器の開発や運用に携わる高度人材を育成し,水中ロボット業界を盛り上げていく必要があると考えている.実践的な水中ロボット研究者(技術者)の育成を目指し,本研究室では水中ロボット開発を通じて「研究・開発」,「ものづくり」,「フィールドワーク」,「データ処理・解析」の4つを一様に学べる教育プログラムを提供している(図1参照).実用的な水中ロボットを製作するにはそれを実際に動かす環境を知る必要があり,実環境を知ることで現場に則したデータ処理や解析が可能となる.また,実環境のデータに触れることで新しい発想や研究が踏まれ,その知見によって最先端の水中機器を作れるようになると考えられる.
2.研究内容・実績
2.1.養殖魚の餌食いつき度判定のためのセンサシステム
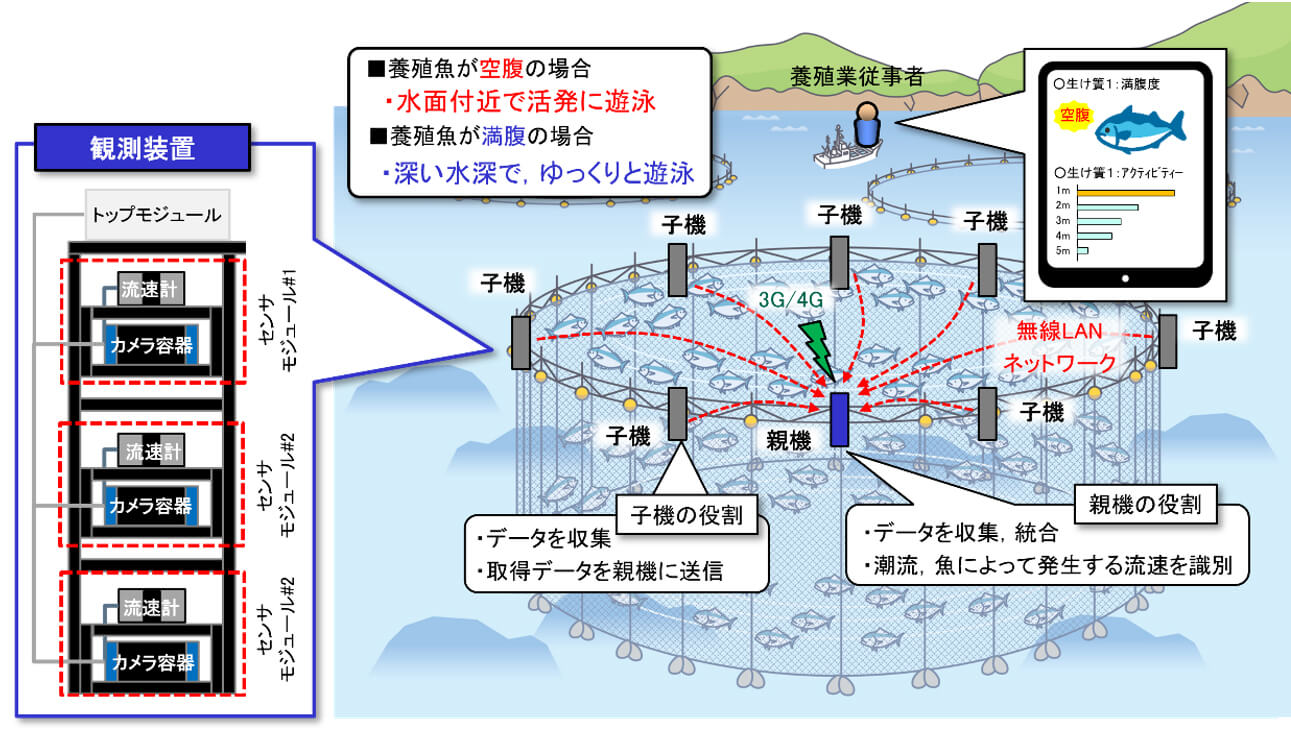
水産資源の減少に伴い,安定的に魚介類を市場に流通できる養殖業の強化が世界的に望まれているが,日本の養殖業は停滞している.その主な要因の一つとして,養殖魚への給餌の問題が挙げられる.給餌する餌の量はコスト面から必要最低限に留めたいが,給餌量が不十分だと養殖魚の発育が悪くなり漁労収入が低下する.漁労所得をあげるため適量の餌を給餌する必要があるが,養殖魚の空腹状態を見極めるのに熟練した技術を要する.効率的な給餌を実現するため,水中カメラで取得した画像をもとにしたAIによって餌の食いつきを判定させる技術が開発され,すでに複数の養殖業者に導入された実績がある.しかし,水中カメラで撮影できる範囲は生け簀の大きさと比較するとかなり小さく,水の濁りや天候,時間によって魚を撮影できないので,画像ベースのAIでは運用が限定されるという問題がある.一方で筆者らが行った事前調査において,養殖生け簀内にいる空腹状態の魚は水面付近に集まり活発に遊泳し,満腹になると安全な深い水深でゆっくりと遊泳するという仮説が得られた.この仮説がただしく,遊泳の速度や水深から生け簀内の魚の食いつき度を判定することができれば,水の濁りや天候に影響されない画期的なシステムを実現できると考えらる.そこで,本研究では図2で示すような養殖魚の餌食いつき度を計測するシステムを開発した.本システムには,各水深に配置された流速センサモジュールとデータを送信するためのトップモジュールで構成される観測装置が用いられる.各深度に配置された流速センサで魚の遊泳によって発生した流速を計測し,そのデータから活発に遊泳している魚の水深帯を特定することで餌の食いつき度が判定できると考えられる.
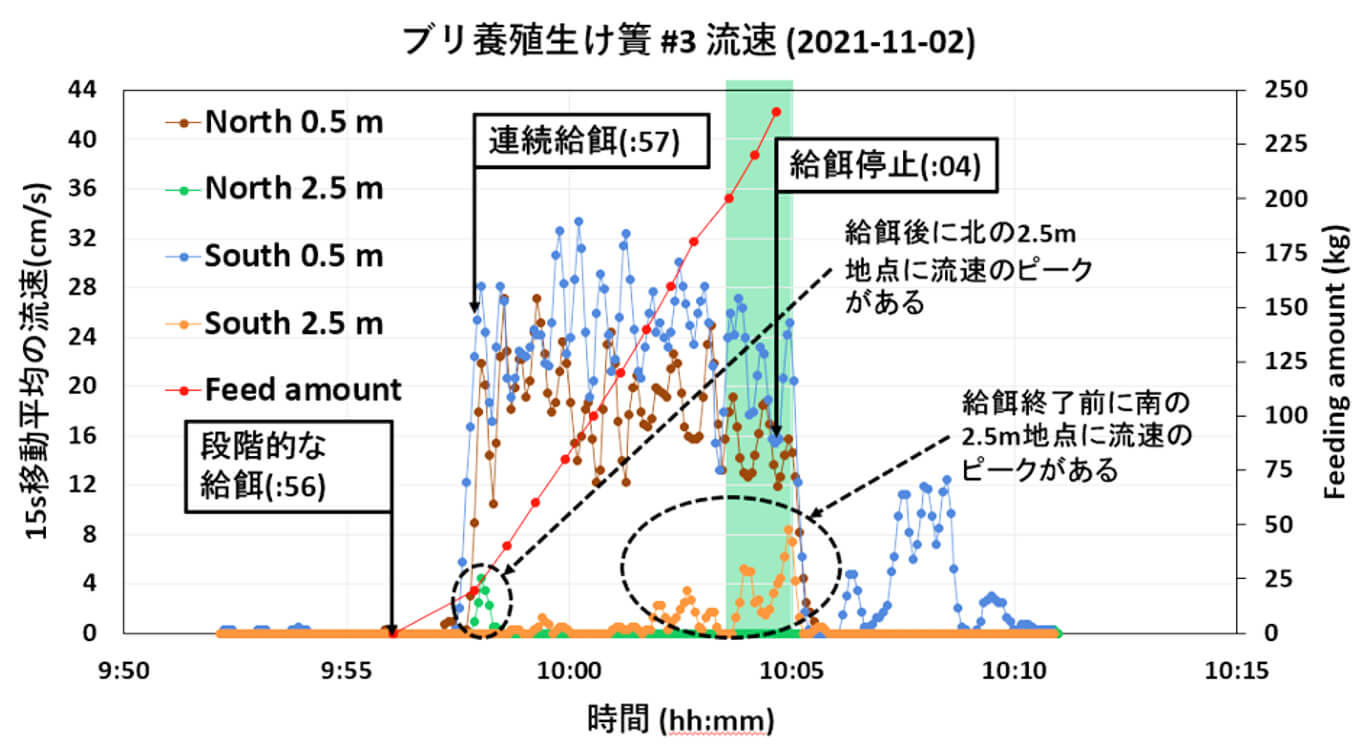
開発したシステムを用いて,2022年11月1日~3日に長崎県の株式会社徳丸水産の養殖場で養殖魚の遊泳によって発生する流速の計測を3回行った.図3に0.5歳のブリが8000匹ほど入った養殖生け簀に開発した2基の観測装置を取り付け,給餌中の流速を計測した結果を示す.給餌開始直後は全てのセンサは低い値を示していたが,連続給仕に切り替えてから北と南ともに表層の流速が平均20cm/s以上まで上昇し,給餌停止するまで平均値がゆるやかに減少していた.給餌停止する3分前くらいから,南の2.5m深度の流速センサの値が増え,最大で8cm/sまで上昇していた.この2つの事実から,ほとんどの魚は餌を食べるため表層に集まり活発に遊泳していたが,養殖生け簀内のブリの一部は10:00~10:02ごろ餌を食べることに満足し,少しずつ表層から深層に移動していたと考えられる.以上の結果から,本システムで得られる流速を用いることで給餌中の生け簀内の魚が活発に遊泳している深度帯や魚の鉛直方向の移動を把握することができると言える.
2.2.ケーブル拘束型水中ロボットを用いた長期海底観測装置
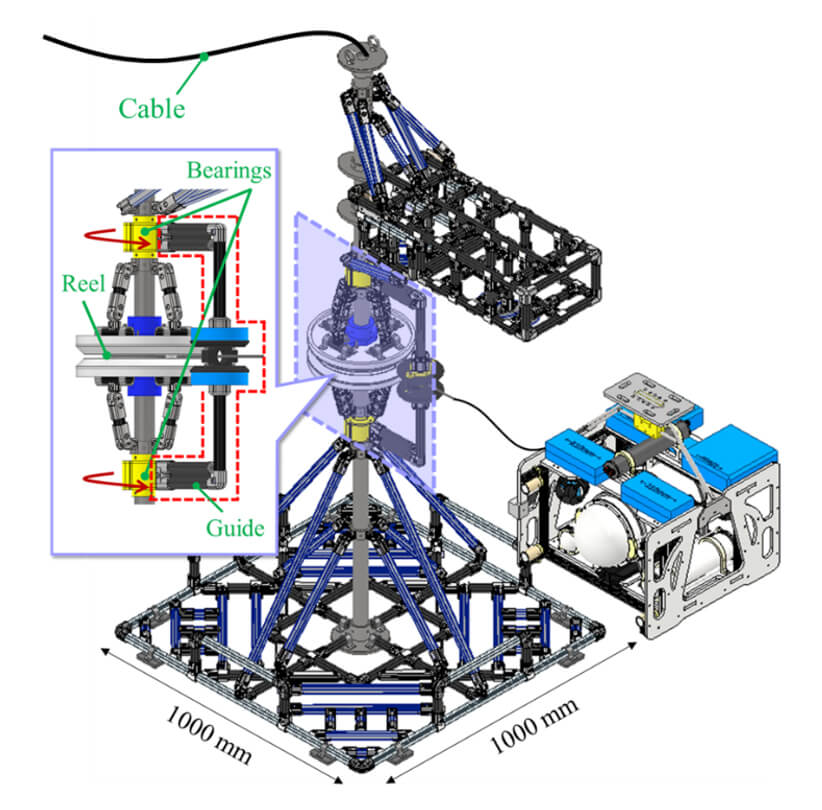
世界的に海中工学の技術が向上しているが,いまだ海洋資源や周辺環境を長期的に観測する装置が実現していないため,海洋資源の生成や減少メカニズムは解明できるだけの十分なデータが計測できておらず,資源の有効利用に至っていない. 海洋資源開発に必要不可欠な時系列データを計測するために,低リスク(紛失リスクが少なく,紛失してもコスト的に損害が小さい)で広範囲に渡って海底を長期間観測できる装置の実現が望まれている.本研究では高価なセンサを搭載することなく低リスクで長期観測ができる図4で示すようなケーブル拘束型海中ロボットを用いた長期観測装置を開発した.本装置は海底に設置されたステーション,航行しながら海底を観測するロボット(CUV:Cable restraint Underwater Vehicle),CUVとステーションを連結するケーブルの3つで構成される.ステーションには,CUVが数か月以上もの間航行できるだけの大容量バッテリーが搭載され,上部にはCUVと連結されたケーブルを巻き付けるためのリールが取り付けられている.CUVは自身の移動用として複数のスラスタを搭載し,必要な電力はステーションからケーブルを介して供給される.CUVが高度をリールと同じ高さに維持した状態で,ステーションを中心とした円の遠心力方向にケーブルが伸びきるだけの十分な推力,かつ円の接線方向にも推力を発生させたとする.その時,理想環境においてケーブルは常にリールの接線となり,CUVはインボリュート曲線に近い軌道を通り,CUVの移動に合わせてケーブルが巻きだされる.この状態を維持するとケーブルはリールから全て巻き出され,今度はケーブルがリールに巻かれながらCUVは航行する.完全にケーブルがリールに巻かれた後,CUVの接線方向の推力を反転させると,CUVは先ほどと逆回転で同様の航行を行う.外力がなく,毎回ケーブルがリールの同じ位置に巻き付いたと仮定した場合,上記の行動を繰り返すCUVはほとんど同じ軌道を通ることが可能である.つまり,本装置は,CUVがケーブルによる拘束状態を維持し,かつ前進(または後進)するように推力を発生させることで,ステーションを中心とし最大ケーブル長と同じ半径の円内の海底をくまなく観測することが可能である.また,CUVの航行はケーブルとリールの拘束によって決定されるため,依存するパラメータを調整することで航行軌道を設計するが可能である.
本装置のCUVが設定した軌道を理論通りに航行できるかを検証するため,水槽にて評価試験を実施した.この時,CUVのSurge推力は流体抵抗から算出した0.1m/sの速度を実現するために必要な推力,Sway推力はカテナリー曲線から算出したケーブルを撓ませないために必要な推力を設定した.図5に設定したCUVの軌道,モーションキャプチャーで計測した実際の軌道との比較,図6にCUVで撮影した画像と設定軌道をもとにフォトグラメトリー手法で復元した水底の3D画像を示す.図を見て分かる通り,本装置は設定した軌道を最大誤差0.05m以下の精度で航行し,速度などの高価なセンサを使うことなく高い精度で水底を観測できることが分かった

3.今後の方向性・展望
近年,AI技術の発展が目まぐるしく,ChatGPTやStable diffusionのように素晴らしいアプリケーションが開発されており,AIの技術が水中ロボット業界の発展に大きく寄与すると考えられる.数年前から本研究室でもAIを使ったデータ処理やアプリケーションを開発しているが,まだ実海域で通用するような実用的なものには至っていない.より実用的かつ社会に貢献できるような水中ロボット技術を実現できるよう,AIなどの最新の技術を常に吸収しながら研究に励んでいきたいと思う.
【著者紹介】
西田 祐也(にしだ ゆうや)
九州工業大学 大学院生命体工学研究科 人間知能システム工学専攻 准教授
■略歴
- 2011年 3月九州工業大学生命体工学研究科脳情報専攻 博士後期課程修了 博士(工学)
- 2011年 4月九州工業大学生命体工学研究科脳情報専攻 研究職員
- 2012年 4月東京大学生産技術研究所 特任研究員
- 2014年11月東京大学生産技術研究所 特任助教
- 2015年 3月九州工業大学若手研究者フロンティア研究アカデミー 特任助教
- 2018年 4月九州工業大学若手研究者フロンティア研究アカデミー 助教
- 2019年12月九州工業大学大学院生命体工学研究科人間知能システム工学専攻 准教授