
鈴木 謙一
3.水中光ワイヤレス通信
3.1 水中光ワイヤレス通信装置の開発
水中の光伝搬特性は,水の濁り(濁度),水中の浮遊物(懸濁物)などによる水中環境の違いや光送受信器の特性により大きく変わる.水中の損失は,波長、ビーム径,水域,さらには季節によって大きく変わるため,水中環境に合わせた光源の選択,バジェット設計が重要となる.水中を浮遊する懸濁物は,光ビームを散乱・屈折させるだけでなく,大きさによっては光ビームを完全に遮断する.また水のゆらぎは,光ビームの光軸の時間変動を生じさせ,光受信器の受光パワー変動,受光はずれを引き起こす.そのため,経路の複数化や有効受光径の拡大など不安定な通信状態に強い通信方式の検討が重要であり,それにはマルチビーム化,受光素子のアレイ化(マルチPD(Photo Detector))が有効である.また,水中環境の変化により,通信状態が大きく変わるため,誤り訂正やMIMO(Multi Input Multi Output)による通信状態の安定化や,高速同期機能による通信確立の高速化も重要である.以上を踏まえて,伝送速度1 Gbpsの水中光ワイヤレス通信装置を開発した.
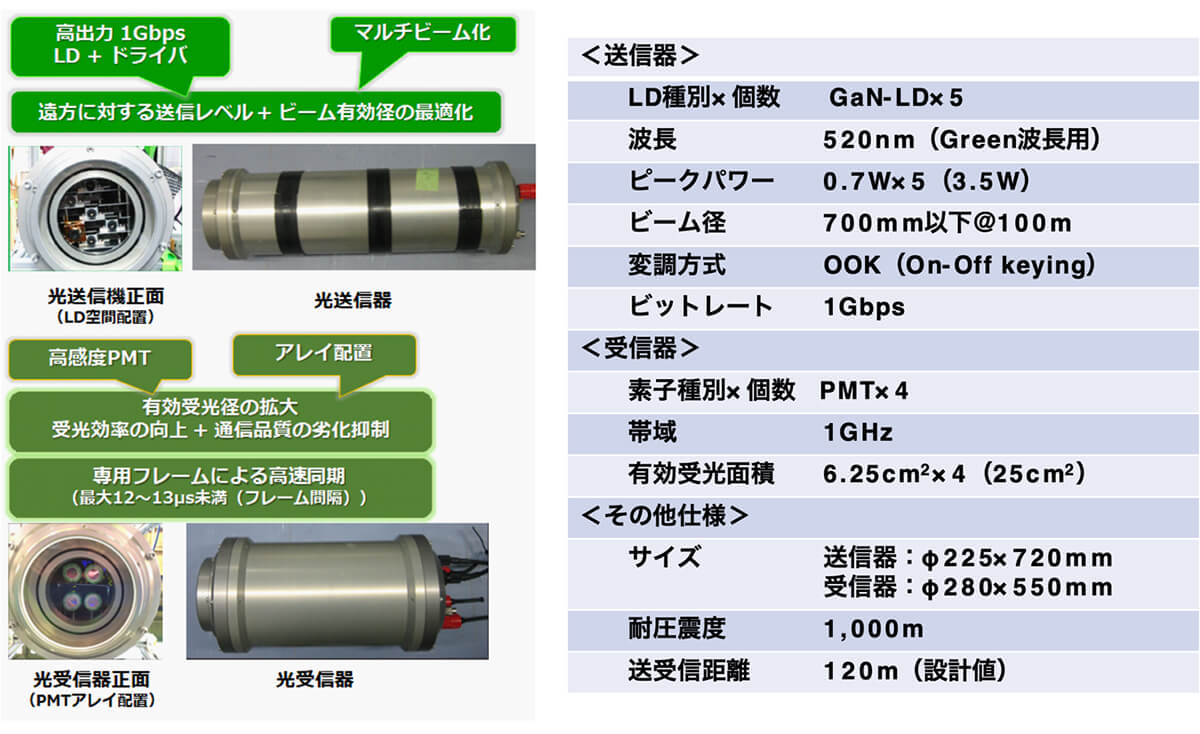
開発した水中光ワイヤレス通信装置を図5に示す.送信器ではピークパワー0.7Wで1GbpsのOOK(On-Off keying)信号で変調した波長520nmのLDを5個用いており,LDのオンオフにより送信パワー制御できるようにした.ビーム径は,水中での100mの距離で70cm以下になるよう調整したが,水中でビームの広がりから距離100mでのビーム径を見積もると50cm程度であった.受信器では,帯域1GHz,有効受光面積6.25cm2のPMTを4つ用いて有効受光面積を25cm2に拡大している.またPMTのオンオフにより有効受光面積,増倍率の制御により受信感度の制御を行っている.これらを変えることで,距離毎に最適な送受信レベル差に最適化することができる.また送受信器を耐圧容器に収容することにより,耐圧深度1000m,設計送受信距離120m(ロスバジェット60dB以上)の水中光ワイヤレス通信装置を実現した.
3.2 多目的プールにおける水中光ワイヤレス通信実験
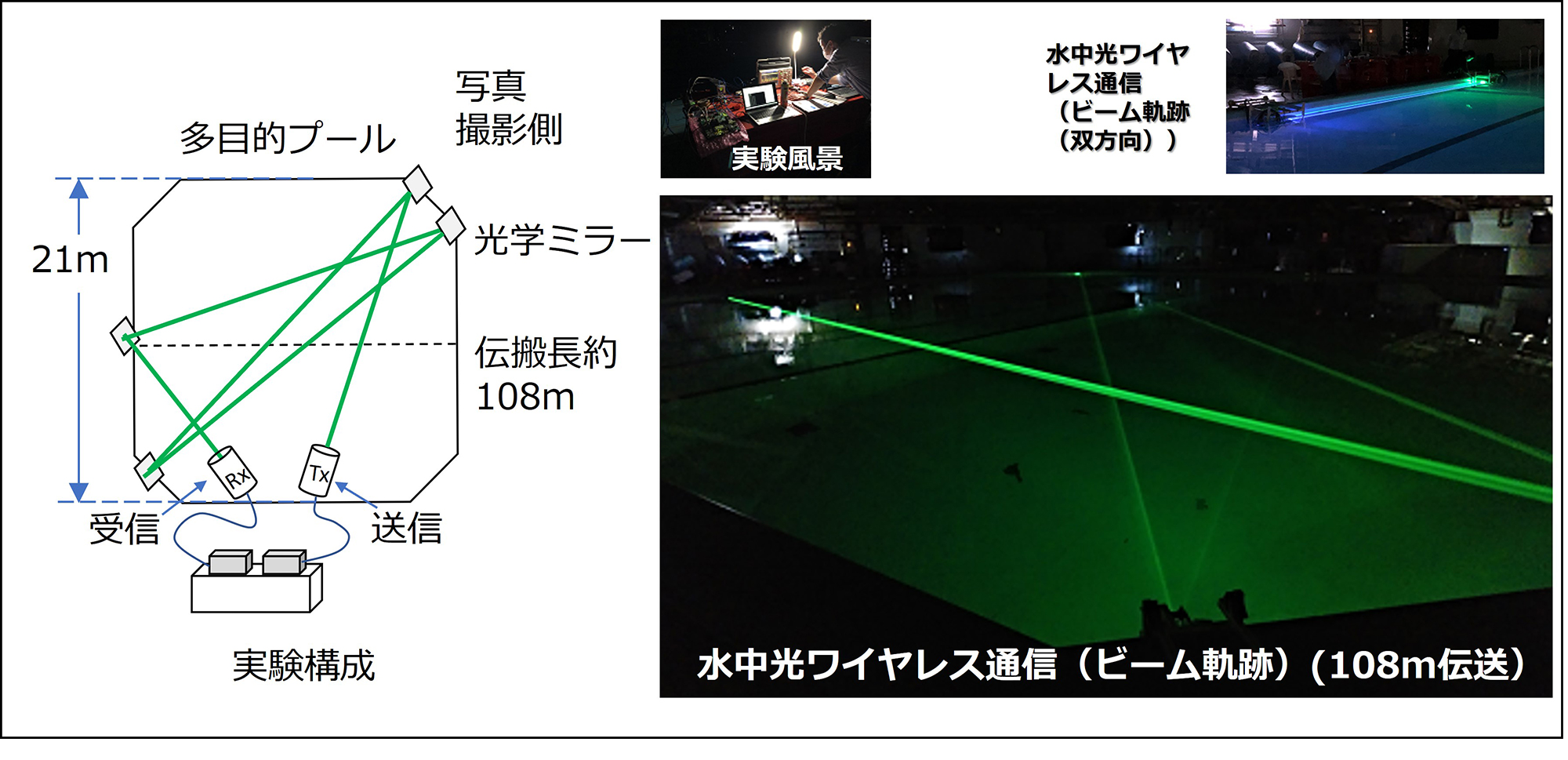
開発した水中光ワイヤレス通信装置を用いて行った水中光ワイヤレス通信実験について紹介する.まず縦横21m×21mのJAMSTECの多目的プールにおいて水中光ワイヤレス通信実験を行った.多目的プールにおける水中光ワイヤレス通信実験の実験系,およびその時のビーム軌跡を図6に示す.図に示すように,送信器から出力された光信号は,プール壁面に設置した光学ミラーにより4回反射され,水中を約108m伝搬した後に受信器に入力される構成で,108mの伝搬距離で信号の受信を確認した.この時のロスバジェットは,設計値に対してかなりのマージンを残しているため,さらなる延伸が期待できる.また図に示すように折り返した後のビーム軌跡が写真上で確認できている.
3.3 実海域における水中光ワイヤレス通信実験
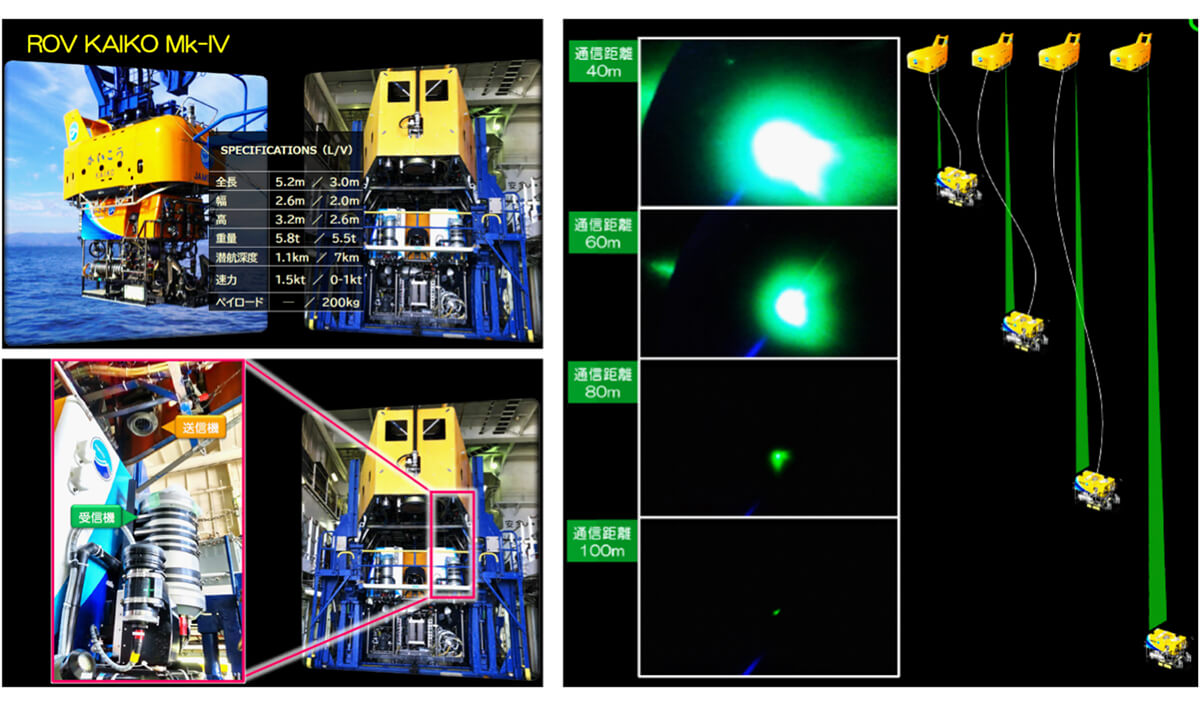
次に相模湾沖水深900mの海域で,水中光ワイヤレス通信実験を行った.実海域における水中光ワイヤレス通信実験の試験構成を図7に示す.開発した水中光ワイヤレス通信装置を,無人深海探査船 かいこうのランチャーとビークルに搭載し,ランチャーとビークル間で通信を行った(「かいこう」ランチャー深度802.9m,「かいこう」ビークル深度699.5m,通信距離102.5m(ランチャー,ビークル高度差)において試験パケット(誤りの無いパケットの受信確認)により受信を確認).ランチャーに対してビークルが徐々に潜航して行くことで,40mの距離から通信状態の確認(正常受信パケット数の確認)を行った.その結果,試験ポイント1において,約102.5mまでの距離で正常パケットの受信に成功した6).
3.4 伝送限界評価
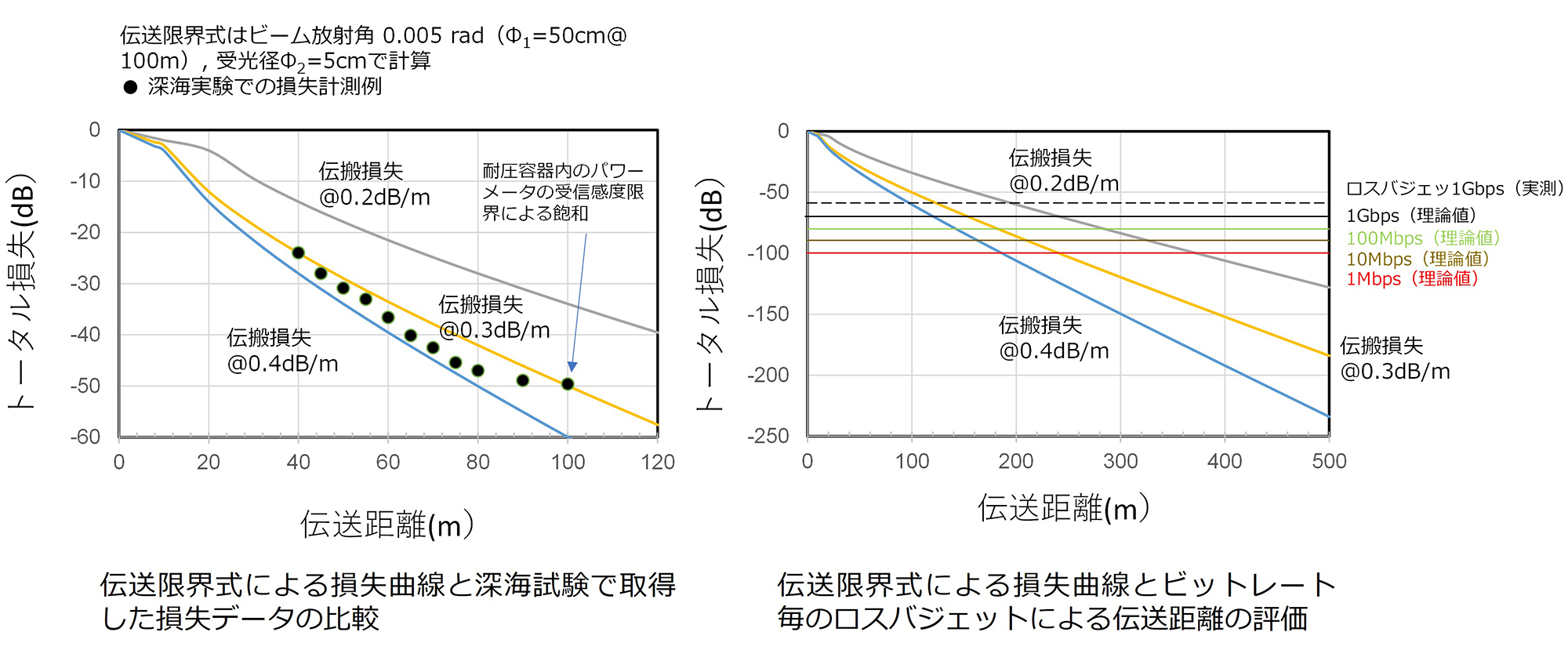
これまでの実験から,主に水中の光の伝搬損失,ビーム径の拡大による損失が伝送距離制限の主な要因となっていると考えられる.これらを反映して伝送限界式を求め,実海域での深海試験でパケット受信が可能であった距離での損失を,伝搬損失をパラメータとした伝送限界式による損失曲線上にプロットした.また伝送限界式による損失曲線とビットレート毎のロスバジェットによる伝送距離の評価を行った.これら伝送限界の評価を図8に示す.上段の図を見るとほぼ伝搬損失0.3dB/m~0.4dB/mの損失曲線の間に取得した損失データが分布していることから,試験時の伝搬損失は0.3dB/m~0.4dB/m程度と推測される.また開発した通信装置の実測値を用いると伝送速度1Gbpsの伝送距離は,伝搬損失0.4dB/mでも100m以上伝送可能と見積もられるので,開発した水中光ワイヤレス通信装置は,ほぼ設計通りの性能を発揮していると考えられる.
一方理論計算により求めたPMTの受信感度に基づくロスバジェットでは,伝搬損失0.2dB/mの条件であれば1Gbpsで240m程度,100Mbpsで280m程度,10Mbpsで330m程度、1Mbpsで380m程度の伝送が可能であると見積もられた7).さらなる伝送距離の拡大にはロスバジェットの増大が不可欠であり,そのためにはマルチビーム化による送信パワーの増大や,受光径の拡大によるビーム径に起因する損失の抑制が重要となる.
4.今後の展望
水中の見える化を実現するため,主に海洋資源や水中構造物の可視化データの取得とそのデータのリアルタイム転送を実現するため,水中LiDARや水中光ワイヤレス通信の研究開発を推進してきた.それに加え気候変動や海洋汚染の問題を受け,光を使った海中のCO2濃度や海洋マイクロプラスチック検出を行う水中環境LiDARの研究開発が期待されている.
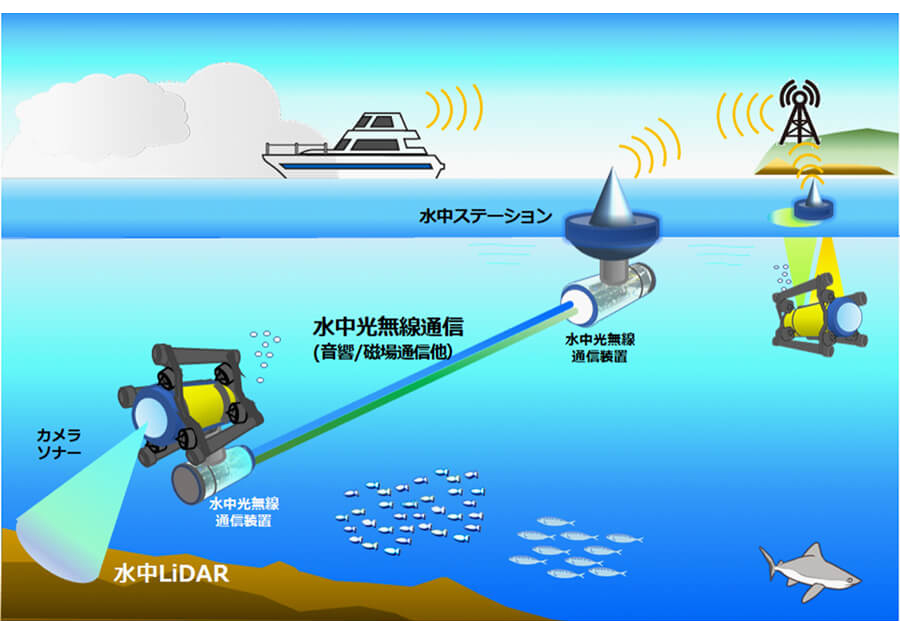
水中を見える化する水中光無線技術を用いた水中ネットワークのイメージを図9に示す.水中ロボットに搭載された水中LiDAR,水中環境測定LiDARにより,海洋資源や水中構造物の可視化データに加えて,水中環境データを取得することで,水中環境データをリアルタイムに地上で転送することで,様々な海洋環境問題への貢献を目指している.さらには既存の水中技術(音響,電磁波)それぞれの強みを生かして光と併用することで,頑強な水中の見える化のための水中ネットワークを実現を目指す.
なお本研究の一部である水中光ワイヤレス通信技術の検討は,防衛装備庁が実施する「安全保障技術研究推進制度JPJ004596」の支援を受けたものである.
参考文献
- トリマティス×JAMSTEC共同プレスリリース(2022-01)
https://www.trimatiz.com/jp/news/detail/?id=79
http://www.jamstec.go.jp/j/about/press_release/20220126_2/ - Ken-Ichi Suzuki, Hiroki Okuzawa, Seigo Takahashi, Shojiro Ishibashi, “Long-distance and High-speed Underwater Optical Wireless Communication System ~Challenge to 1Gbps x 100m underwater optical wireless communication~”, URSI GASS 2023, paper D02-2-1, August 2023.
【著者紹介】
鈴木 謙一(すずき けんいち)
株式会社トリマティス 代表取締役,博士(情報科学)
■略歴
NTT研究所において超高速光伝送方式や光アクセスシステムの研究開発,IEEE802.3WG,1904WGにおいてPONの標準化に従事後,2019年株式会社トリマティス入社.水中LiDARや水中光無線通信技術の研究開発に従事.2024年4月より現職.OPTICA(前OSA),IEEE,信学会各会員.