
鈴木 謙一
1.はじめに
日本を取り巻く広大な海洋およびその資源の有効活用,老朽化する水中インフラや新たな水中インフラの効率的な点検のためには,海中の詳細データの取得が不可欠であり,水中へのICT/IoT技術の積極的な導入が期待されている1,2).しかし現状では研究機関用の水中技術が主体である.ところで水中では地上で広く使われている電波が使えないことから,水中での伝搬損失の小さい音波が広く使われてきた.一方,音波は水中での伝搬損失が小さく到達性に優れているが電波に比べて扱える情報量が少ない欠点がある.そこで,水中での損失が小さい可視光を使った水中光無線技術の適用を検討し,既存の水中技術と併用することにより水中を見える化する大容量ネットワークの実現を目指す2,3).
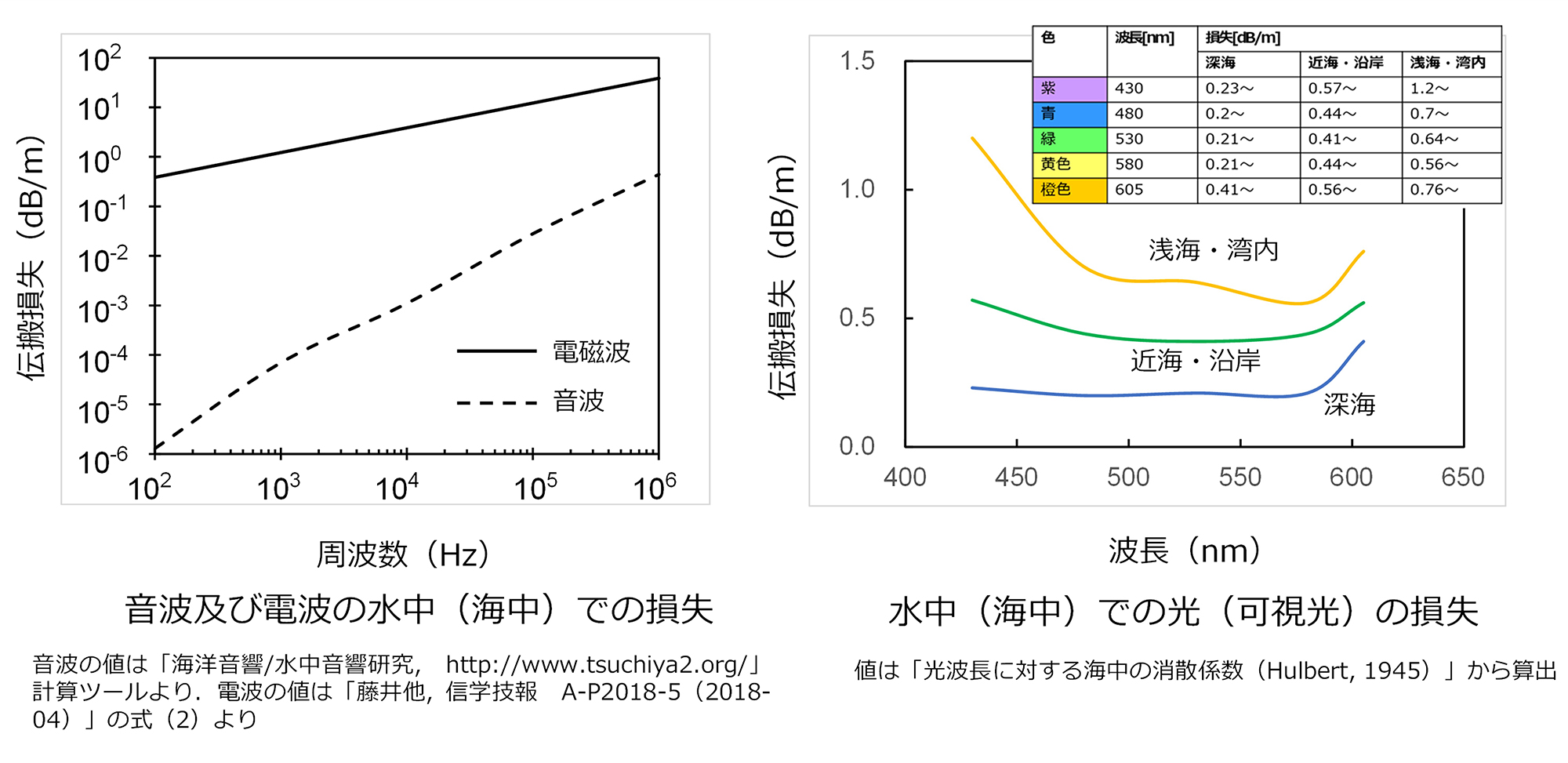
水中(海中)での音波,電波,および光の損失を図1に示す.図に示す様に,水中での電磁波,音波の損失は周波数が高くなるほど大きくなる.一方光については,可視光領域,特に青色から緑色(浅海や濁度が高いところでは黄色)で損失が小さくなることが知られている.また深海では、青~緑色の光が低損失,近海・沿岸、浅海・湾内と濁度が高くなると緑から黄色へと低損失波長が(さらに汚くなると赤が低損失波長に)シフトする.
次に水中で利用可能な光デバイスについて述べる.青色光源としては,変調帯域がGHz程度以下と狭いが,高出力で,低コストなGaN-LDが普及している.また緑色光源としても期待されている.LD以外にも,ファイバーレーザー,固体レーザーや波長変換による緑色光源が入手可能である.黄色光源としては,固体レーザーや波長変換による研究開発が行われている.受光素子としては,可視光に感度があり高速なSi-APDや,さらに高感度なMPPC(Multi-pixel Photon Counter),PMT(Photo Multiplier Tube)の利用が期待されている2).
2.水中LiDAR
2.1 水中LiDARの開発状況
トリマティスの開発するLiDAR(Light Detection and ranging)は,計測対象物にパルス化したレーザー光を照射し,その反射光が戻ってくるまでの時間から対象物までの距離を計測するToF(Time of Flight)LiDARがベースである.またレーザー光で縦横にスキャンすることで“ものの大きさ”を正確に測定することが可能である.
トリマティスでは,電波に比べて水中での損失が小さく,音波に比べて扱える情報量の多い可視光を使った水中LiDARの開発を行っている2).これまでの水中LiDARの開発状況を図2に示す.
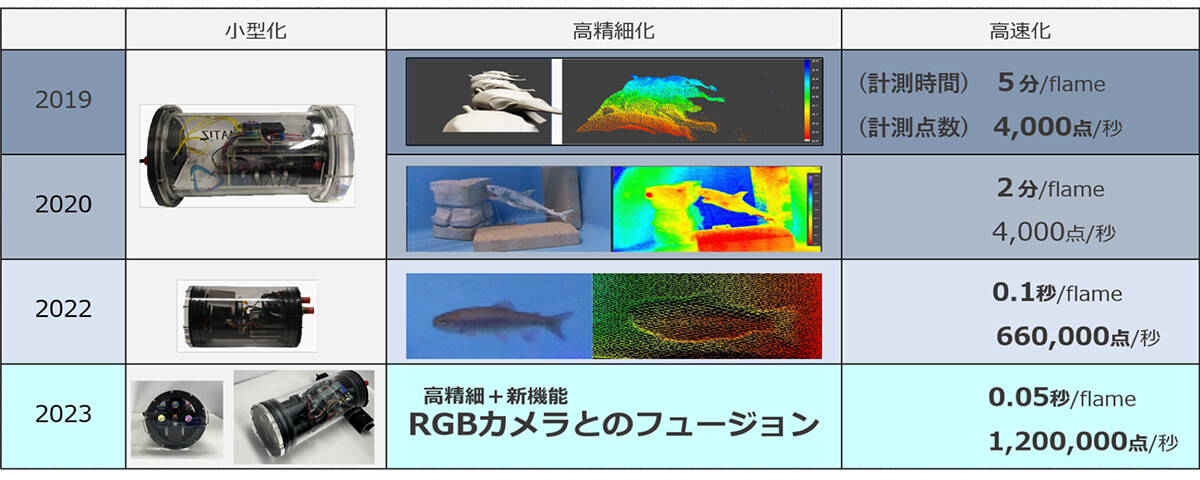
初期に開発した水中LiDARは,直径φ200mm×全長L440mm(約16.6リットル)と大きく,計測もガルバノスキャナを用いて時間をかけて行うものであったが,開発した水中LiDARを使って水中実験を繰り返すことにより課題の抽出と解決を図った.実装の改善,パルスエッジ検出精度の改善,およびMEMS(Micro Electro Mechanical Systems)による高速スキャナの採用などにより,小型・高精細で高速スキャン可能な水中LiDARを実現した.これによりφ150mm×L300mm(約6.6リットル)のサイズダウン,スキャン速度20フレーム/s,最大計測点数120万ポイント/sの高速スキャンを実現した.
2.2 水中LiDARによる計測例
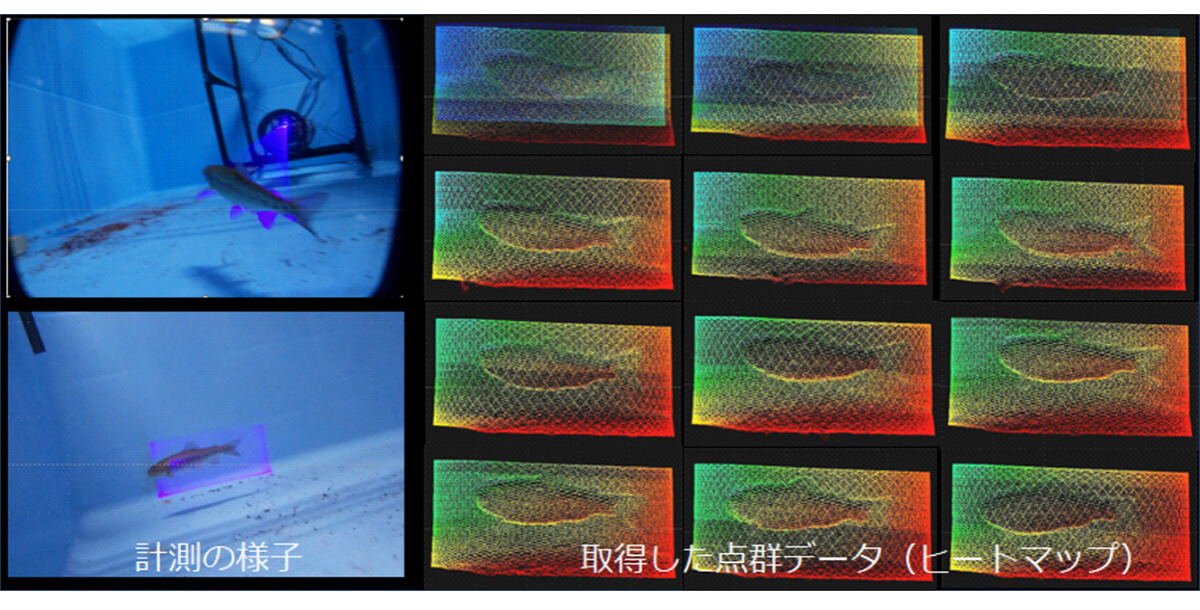
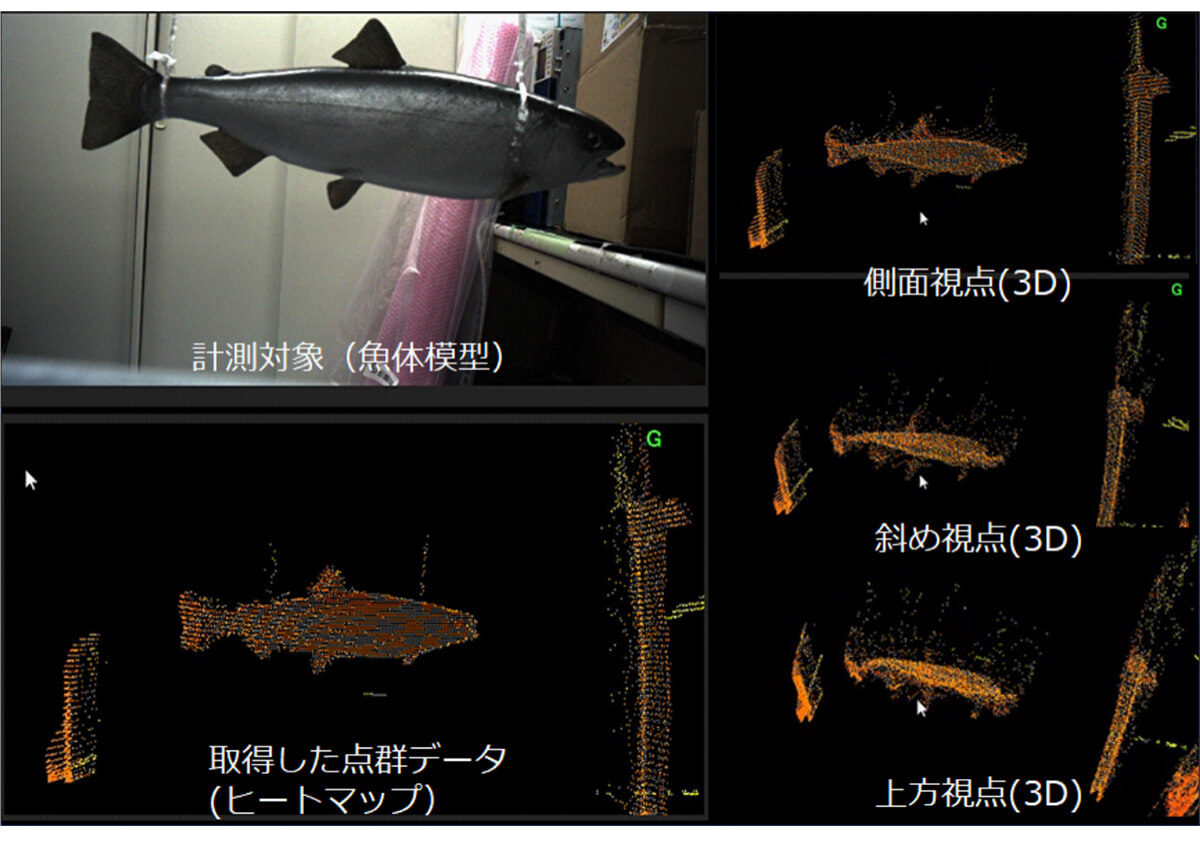
実際に泳いでいる魚を水中LiDARで計測した結果を図3に示す.図に示す様に,スキャン速度の向上により動いている計測対象物をリアルタイムに計測することが可能となっている.また測定対象物(魚の模型)を側面から計測し,視点を変えて3D表示した結果を図4に示す.取得した点群データを3D表示することで,視点を変えて,側面,斜め,上方から見た測定対象物の形状を再構築することができ,単一視点からの計測でも立体的な計測情報を得ることができる.
さらに高機能化(高精細+新機能)を行うため,RGBカメラと水中LiDARを融合させたフュージョンセンサー(アクアフュージョンセンサー)を開発している4,5).アクアフュージョンセンサーは水中にある物体(構造物,地形,生物など)の3次元データを、レーザーでスキャンすることにより得られた精密な3次元位置情報と,カメラより得られたカラー画像と組み合わせてリアルタイムに取得,表示できる先進的なセンサーである.また水中では初となるRGB3色を用いた3次元計測,LiDARとカメラの計測データの融合を可能としている.
次回に続く-
参考文献
- 内閣府 海洋資源の開発及び利用(2024年8月8日閲覧)
https://www8.cao.go.jp/ocean/kokkyouritou/yakuwari/yakuwari03.html - 鈴木謙一,高橋成五,“水中LiDAR ~水中における可視光3DスキャンLiDARの開発~“,電子情報学会 通信ソサイエティマガジン No.60,春号2022, pp.307-313
- ALAN (ALANコンソーシアムWeb page,2024年8月8日閲覧)
https://www.alan-consortium.jp/ - 鈴木謙一,奥澤宏輝,川端千尋,手塚耕一,“視光デバイスを用いた水中 LiDAR の開発”,2023年電子情報通信学会総合大会,ABI-1-4,(2023-3)
- Ken-Ichi Suzuki, Hiroki Okuzawa, Chihiro Kawabata, Koichi Tezuka, “Underwater LiDAR utilizing Visible Light Devices”, URSI GASS 2023, paper D02-2-3, August 2023.
【著者紹介】
鈴木 謙一(すずき けんいち)
株式会社トリマティス 代表取締役,博士(情報科学)
■略歴
NTT研究所において超高速光伝送方式や光アクセスシステムの研究開発,IEEE802.3WG,1904WGにおいてPONの標準化に従事後,2019年株式会社トリマティス入社.水中LiDARや水中光無線通信技術の研究開発に従事.2024年4月より現職.OPTICA(前OSA),IEEE,信学会各会員.