
ガーディアンロボットプロジェクト
川西 康友
1. はじめに
理化学研究所ガーディアンロボットプロジェクト(以下理研GRP)では,高齢者の生活を見守るロボットを応用として,人に寄り添い,一緒に暮らす人がロボットにこころを感じられるようなロボットの実現を目指した研究をしている[1, 2].
現在,人の生活に入り込んでいるロボットのうち最も代表的なものは,掃除ロボットである.掃除ロボットは自律的に部屋の中を移動し,掃除をする.我々は,このような道具としてのロボットではなく,家族の一員のように一緒に暮らせるロボットの実現を狙っている.そのためには,自律的な移動機能,対話機能に加え,人がロボットに対してこころを感じられることが望ましい.そこで,我々はこころのメカニズムの解明及びロボット実装を通じて,こころを感じられるロボットの実現に向けて研究をしている.
我々は,ロボット実装としてこれまでにいくつかのロボットを実装してきているが,本稿ではその中の一つで,自律的に室内を移動し,人とコミュニケーションを取れる自律移動型対話ロボットIndy[3]について紹介する.我々は,こころを感じられる要素の一つとして,ロボットが自身の意図や記憶を持って主体的に行動していることが重要だと考えている.Indyでは,主体的な行動の実現を目指したシステムを実装している.
2. ロボットのハードウェア構成

Indyを図 1に示す.このロボットは,Keigan社製のKeigan Aliをベースに,子ども程度の背の高さ110cm程度のヒューマノイドの胴体を持つ.首,胴体,各腕がそれぞれ2,1,4自由度で可動し,様々なジェスチャや動作を表出する機能をもっている.また,両目にはディスプレイが埋め込まれており,表示を切り替えることにより,表情を変えることができる.センサとして,Keigan Aliがもつセンサに加え,ロボット本体には頭部にRGB-Dセンサ(Intel Realsense D455),両肩に1ラインのLiDAR(YDLIDAR T-mini Pro)を1基ずつ,胸部に16 chのマイクロホンアレイ(System in Frontier RASP-ZX)を搭載している.RGB-Dセンサは周囲の様々な物体や状況の認識に利用され,LiDARとマイクロホンアレイは周囲の話者を認識して音源分離・音声認識に利用される.
3. 主体的な行動決定のためのシステム構成
3.1 基本的な処理の流れ
我々はIndyにおいて,ロボット自身の意図に基づいて記憶を参照しながら一貫した行動決定ができる仕組みの実現を目指している.そこで,図 2に示すような階層的なモデルを実装した.このシステムでは,センサを用いて外界の情報を入力し,自己位置推定モジュールや周囲環境認識モジュールによって,外界の情報を収集する.そして,それらを内部表現として記述,保存する.次に,意図モジュールが,内部表現と,自身の記憶(データベース)に基づいて,意図を決定し,発話内容生成モジュールや行動計画モジュールによって,どこへ行くべきか,何をどう話すべきかを生成して内部表現の形で記述する.最後に,移動制御モジュールや発話制御モジュールが,内部表現で記述された情報を受取り,ロボットに合った方法で移動や発話を実際に生成してロボットを動かす.一方で,障害物回避などの動作は,意図や記憶を参照したりする必要がないため,周囲環境認識モジュールが出力する情報を直接利用してロボットが移動する.
外界との相互作用(認識・行動)はセンサやロボットの身体性によって異なるが,このような内部表現を介した2層構造にすることにより,行動決定をするモジュールは,ロボットの身体性に依存せずに処理することができ,様々なロボットに共通で利用できるようになっている.

3.2 状況に応じた行動決定
Indyは,普段は見回り(巡回監視)を基本動作として実行するが,その時その状況で必要な動作を決定して行動することが求められる.我々は,家庭内の見回りをメインシナリオ,各状況での特別な動作をサブシナリオと捉え,図 3に示すような,必要に応じてシナリオを切り替える状態遷移モデルを設計した.
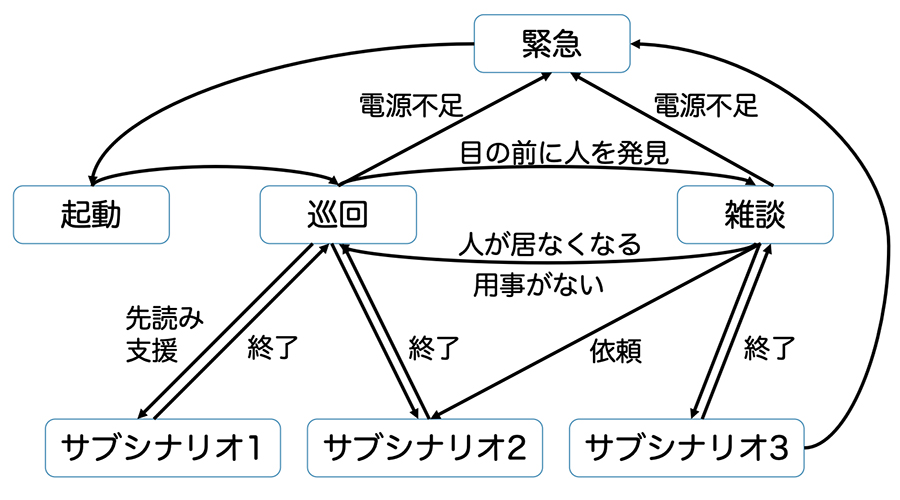
メインシナリオとして基本的にロボットは部屋を見回りしているが,ロボットと人が接近した場合は,雑談モードに入る.そこで何かしらの依頼を受けると,サブシナリオに切り替えて動作する.一方,周囲の状況に応じて適宜先読み支援を行い,人が必要としそうな支援(サブシナリオ)を頼まれることなく先回りして実行できるようになっている.また,常時電源状態をチェックしており,電源不足になるとシナリオを中断してステーションへ戻るような設計になっている.
各サブシナリオを自由に設計し,追加・削除に柔軟に対応するため,割り込みによる受動的な状態遷移と,現在状態の処理に基づく能動的な状態遷移の機構を備えている.能動的な状態遷移は,現在のシナリオ終了後に指定した任意のシナリオへと遷移できるよう,また割り込みによる受動的な状態遷移については,指定した任意のシナリオから割り込みができるようになっているのが望ましい.そのため,状態遷移先をコード中にあらかじめ記述せず,各状態に対し,どのシナリオから割り込みを許容するか,終了後にどのシナリオに遷移するかを別途設定ファイルに列挙するよう実装した.Indyは起動時にこの設定ファイルを読み込み,動的に状態遷移図を生成して動作する.
各状態では,1) 割り込み確認,2) 現在状態での処理,3) 能動的な状態遷移の3ステップで動作する.まず,割り込み確認では,現在の状態に対して割り込みを許可されている各状態が割り込むかどうか判断し,割り込めるシナリオが現在のシナリオよりも優先度が高い場合,最も優先度の高いシナリオへと遷移する.その後,現在のシナリオでの処理を1ステップ進めたあと,終了するかを判断し,終了する場合は遷移先シナリオへと状態遷移する.以上の処理により,設定ファイルを用いて柔軟に動作する仕組みを実現している.
次回に続く-
参考文献
- 湯口 彰重, 河野 誠也, 石井 カルロス寿憲, 吉野 幸一郎, 川西 康友, 中村 泰, 港 隆史, 斉藤 康己, 美濃 導彦
ぶつくさ君:自身の外界認識と内部状態を言語化するロボット
日本ロボット学会誌,40巻10号pp.932-935, 2022年 - Wataru Sato, Shushi Namba, Dongsheng Yang, Shin’ya Nishida, Carlos T. Ishi, and Takashi Minato, An android for emotional interaction: Spatiotemporal validation of its facial expressions, Frontiers in Psychology, Vol.12, 2022.
- Huthaifa Ahmad, Angel GarciaContreras, 河野 誠也, Chaoran Liu, 湯口 彰重, 薗頭 元春, 川西 康友, 石井 カルロス寿憲, 港 隆史, 中村 泰, 吉野 幸一郎, Heikki Ruuska, 斉藤 康己, 美濃 導彦
“生活空間を周回し自発的にユーザ補助を行う自律型対話ロボット”
第41回日本ロボット学会学術講演会予稿集, 2023年
【著者紹介】
川西 康友(かわにし やすとも)
国立研究開発法人理化学研究所
情報統合本部 ガーディアンロボットプロジェクト
感覚データ認識研究チーム チームリーダー
■著者略歴
- 2006年京都大学工学部情報学科 卒業
- 2008年京都大学大学院情報学研究科 修士課程修了
- 2012年京都大学大学院情報学研究科 博士課程修了(京都大学博士(情報学))
- 2012年京都大学学術情報メディアセンター 特定研究員
- 2014年名古屋大学未来社会創造機構特任 助教
- 2015年名古屋大学大学院情報科学研究科 助教
- 2017年名古屋大学大学院情報学研究科 助教
- 2020年名古屋大学大学院情報学研究科 講師
- 2021年国立研究開発法人理化学研究所 チームリーダー
- 2021年名古屋大学 客員准教授
- 2022年奈良先端科学技術大学院大学 客員教授
現在に至る.
ロボットによる周囲環境認識及び,人物追跡・属性認識・行動認識などの人物画像処理に関する研究に従事.特に,認識器の学習データに含まれていない,認識器にとっての未知物体の認識に関する研究に注力している.