佐藤 弘志
【初めに】
第1期海洋基本計画が2008年に策定され、昨年2023年には新たに第4期海洋基本計画が始まった。その間、 EEZ(排他的経済水域)の概念とその利活用として、水産資源、エネルギー、鉱物資源に加えて安全保障や環境保護、海上設備の保全や防災・減災などの取り組みが進められ、海洋が脚光を浴び始めている。このように、これまで興味という面では宇宙に比べて地味であった海洋が宇宙に並びつつある。
ただ、海中はもとより、海上における産業活動での実作業を考えると、これまで私たちが行ってきた陸上の産業活動の「人が自分の眼で見て、鼻で匂いを嗅いで、耳で音を聞いて、触れて振動や温度を感じてその情報と遠隔監視・制御で対応する」手法とは異なる手法を考える必要がある。例えば、これまでの私たちの技術は「陸上での人に帰属した産業活動」を前提に組み上げられてきたことから、「海中・海上で人と同じことを感じる技術を上手く活用する」などの現在の技術を活用することで、海洋開発が進むと考えられる。
陸上で人が行う作業が何かという点にハイライトして考えると次の通りとなる。人は目や耳や鼻から入ってくる情報と触ることにおける対象物の状況認識、そしてそれを言葉や神経で頭に伝え、それと知識を照らし合わせて経験としている。経験したものに対して情報を受け取った脳が過去経験を元に対処方式を判断して対処しており、初めての事象も過去の経験に類似するものに結び付けて対処することが特徴である。そう考えると、海中ではこれらの殆どが出来ず、海上では人が継続してそこに滞在できるツール(船舶等)があって初めてそれが出来る事となる。即ち、人がこれまでに進化してきた手法そのままでは対応できないのが海洋での事業展開となる。
では、人の代わりに人と同じかそれ以上の情報を頭脳に伝え、精確な判断をさせるツールが有れば、陸上と同じことが出来ることとなる。それがセンサであり、DXとなり、それらを管理するシステムとなる。この機会に海洋での産業開発に関してのセンサやシステムについて考えた。本報告では開発から建設、操業とその用途はかなり広くなるので、操業という部分に視点を置いた。さらに、「人」の能力をどう置換するのか、何が代替するのかというのを基軸にまとめた。
【海洋における事業とセンサ】
海洋に於いての事業として考えられるのは、既存の「水産業」の他に「洋上風力発電」・「海洋資源開発」・「海洋インフラ保守」・「安全保障」・「防災・減災」であり、これに「海洋環境保護用の監視」も視野に入る。何れも、陸上であれば人が現地に行って状況を確認するが、海洋ではそれが難しく、人の「目」や「鼻」や「耳」や「接触による感触」を代替するものとして、各種のセンサが使われることとなる。人の五感に対応する形を考えると、
- 眼(視覚): カメラ
- 鼻(嗅覚): 海水中の不純物検出センサ、空中の不純物検出センサ
- 耳(聴覚): 海中の圧力変化検出センサ、空中の音センサ
- 口(通信): 海中、空中の通信設備
- 肌(触覚): 海中の振動、温度変化検出センサ、空中の振動、温度変化検出センサ
が代表例として挙げられる。この他に自律航行に必要なセンサも必要だが、今回は産業界にて活躍するための遠隔監視・状態監視とその省人化システムについての内容を中心に述べる。
人の場合はこの感じたものを脳に送って、異常を経験値から確認して対処への動きとなる。同様のことを当て嵌めると、この「五感で得て脳に送られた情報に基づく行動」の部分がDX(Digital Transformation)になると考えられる。人の脳の「経験値に応じた判断」はこのシステムでは「通常範囲であればDXのシステム内にあるAIが経験値による対処」となり、未経験の領域であれば、「人が経験者に聞いて指示を仰ぐ」のと同様に「コントロールスーパーバイザーに報告して指示を仰ぐ」という形になる。これらを検討している各海洋事業で考えると次から示す事例とその概念図のようになる。
1.洋上風力発電
洋上風力では、
- 海上: 風車、発電設備
- 海中: 電気ケーブル、基礎
というものが監視対象となる。
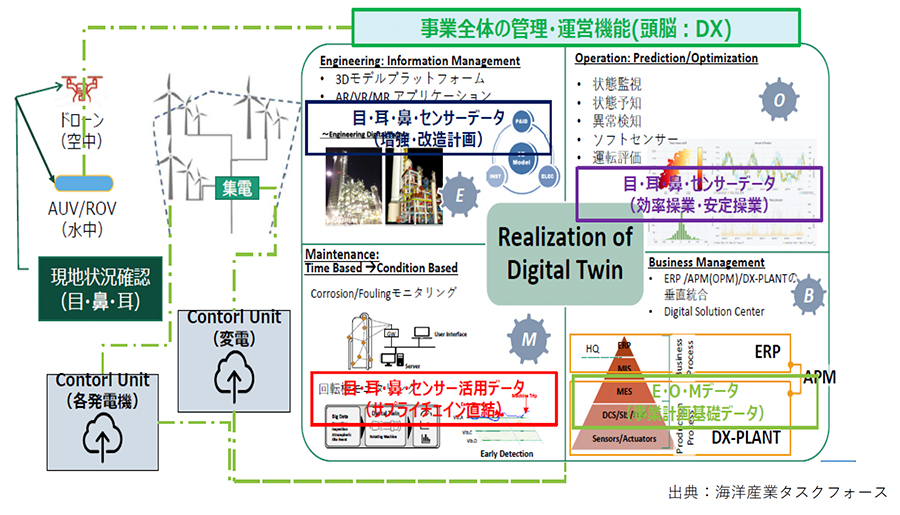
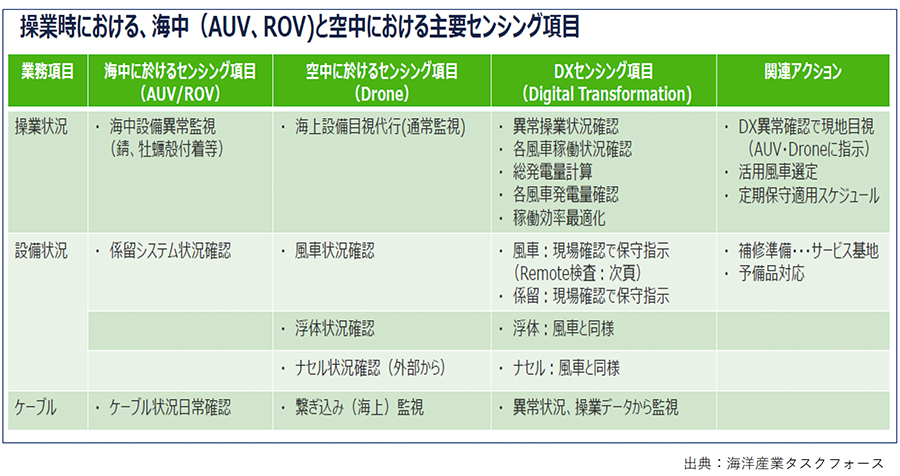
この場合、海上設備の操業・保守にはDrone、海中設備の操業・保守にはAUV(Autonomous Underwater Vehicle)やROV(Remote Operated Vehicle)等が人の代わりに設備の状況確認に使用される。設備管理からくるデータと並行して、これらの情報は中央コントロール室に送られ、その上位に位置して、全体を管理監督するDXシステムへ供給される(図1)。DXシステムにはAIが搭載され、人間の脳の役目を行い、操業全体の管理を行う。AIはその特性から経験の無いものには対応できないので、この部分を対応できる経験豊富なスーパーバイザーが管理室に常駐する。ただ、ルーティンと判断される経験事象についてはAIが自動的に判断し、スーパーバイザーに結果報告をするので、人(スーパーバイザー)の作業量は現状に比べて激減することが考えられる。洋上風力発電に於いて、操業段階で無人探査機が取得する主要なデータは表1に纏める。
2.メタンハイドレート開発
これはメタンハイドレートに代表される海洋からの油ガスの回収の場合を念頭に置いたものである(図2)。
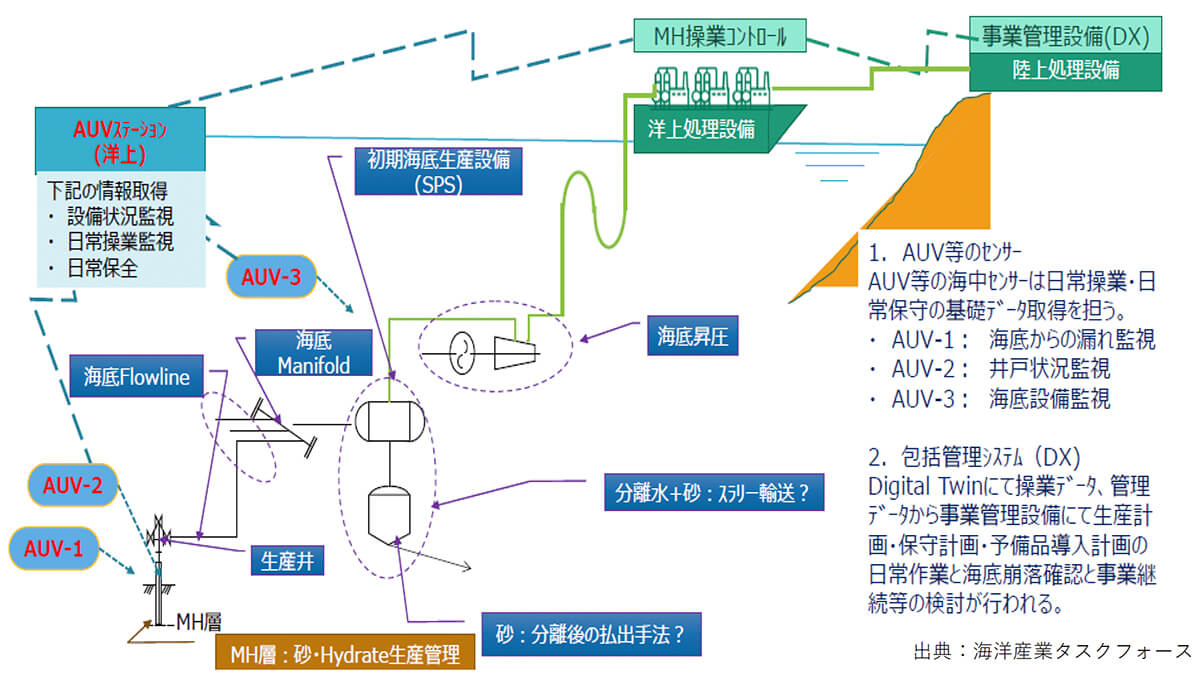
このシステムは基本的に洋上風力と変わらず、センサの機能、DXとして行う機能も変わらない。変わる部分はセンシングの対象で、メタンハイドレート層の生産による変化と、操業保守対象の設備が海中・海底中心となること、海上に関しては船上からの操業監視でAUV等の状況監視機能が小さくなる点が異なる。ここでメタンハイドレート層の変化とは海底下の地層がメタンハイドレート(ガス)を生産されることで、その地層の形状変化や地層からの油ガスの漏れ等を監視することとなる。ガスが海中に流れ出ることを感知する「鼻」の機能と海底での地形が変形するのを監視する「眼」の機能の強化が必要となる。従い、AUV/ROVに代表される海中機器は次の「設備を監視するもの」と「油ガスを保有する地層エリア全体を監視するもの」の二種類が必要となる。
- 設備を監視する機器:固定設備を監視するため、定点に留まるか、決められた狭い領域を移動
- ガスの生産井近辺を監視する機器:複数ある生産井を巡回して監視
- 地層全体を監視する機器:対象となる地層からの漏れを監視するため、動き回って広い領域を移動
機能としてのDXは変わらないが、「経験値」については「海底油ガス田の操業知見」となる。
3. 海洋CCS
CO2を地層に圧入するCCSは、油ガスの生産と同様の操業・保守のシステムを適用することとなる。従い、上述のメタンハイドレート事業と同様にAUVやDroneが使用され、それに搭載されるセンサ、コントロールするGXも同様の対応が必要となる(図3)。
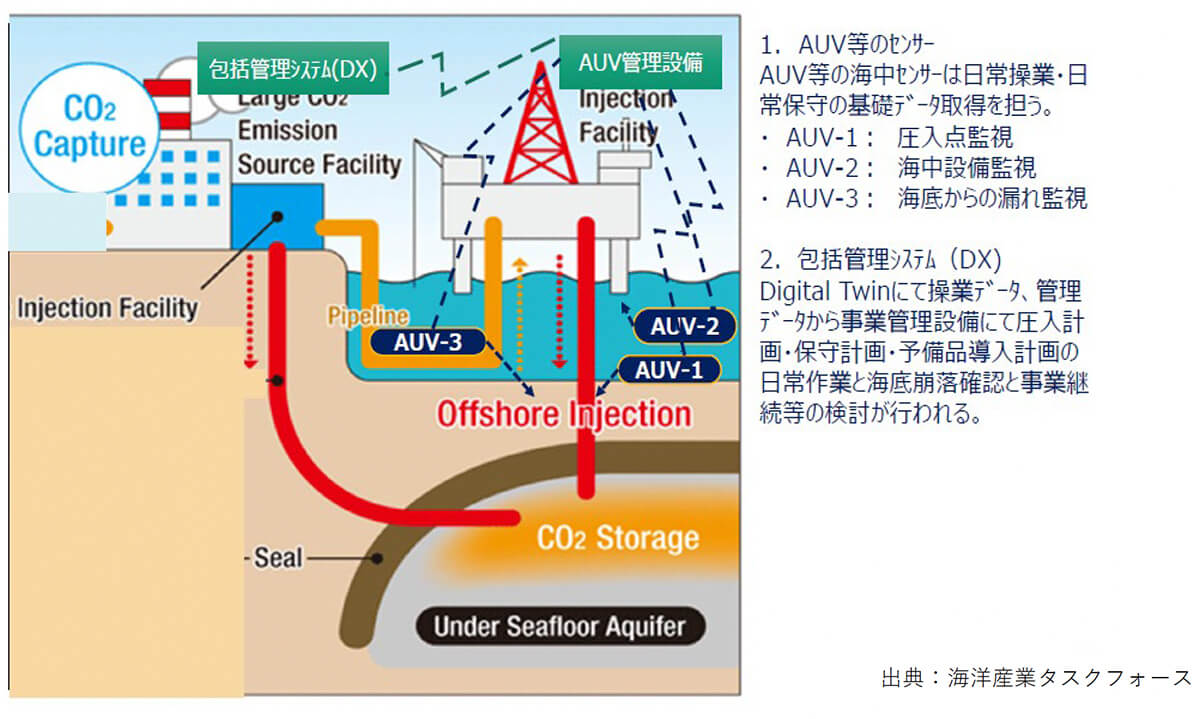
対象となるのは、
- 海上、海中の設備
- 圧入井
- 圧入する地層の広がり部分
となり、その状況確認は油ガス生産と同様のものとなる。圧入流体がCO2という無味無臭のものである点がこの事業にAUV等を投入する際の開発ポイントとなる。CO2センサが新たに導入されるが、海中にCO2は多く存在しており、その濃度の異常値等を認識するセンサが必要となる。
次回に続く-
【著者紹介】
佐藤 弘志(さとう ひろし)
海洋産業タスクフォース
東洋エンジニアリング株式会社 海外営業統括本部 カーボンニュートラス本部
■略歴
- 昭和56年04月東洋エンジニアリング㈱入社
- 平成05年06月エネルギー事業推進センター幹部部員・主査 等
- 平成11年06月プラント事業本部施設・環境事業部エネルギーグループ兼 基本計画本部幹部部員・参事補
- 平成12年10月プラント事業本部施設・環境事業部資源開発グループ幹部部員・参事補 -Toyo U.S.A., Inc.(副社長)
- 平成17年04月より海外事業本部資源開発部長・資源エネルギー本部長 など歴任
- 平成23年05月より執行役員・エネルギー事業本部長を歴任
- 平成31年04月社長特命(ストラテジックアライアンス担当)
- 令和03年04月プラントソリューション事業本部(シニアプリンシパル)
- 令和04年06月海外営業統括本部カーボンニュートラス本部
- (シニアプリンシパル、現在に至る)