◆発表のポイント
・農業用ロボットには、屋外の光環境が変化しても計測結果が変化しない計測特性が求められる。
・一方、屋外用ロボットは、空間計測(対象物の位置・寸法をリモート計測すること)時の周囲環境(晴雨、雲の移動、風による木漏れ日など)の変化や、太陽の日周運動による角度変化、季節による太陽高度の変化などの時変光環境外乱の影響を大きく受けるため、屋外空間計測の高精度化は困難な課題だった。
・複眼カメラには、左右カメラ画像情報の比較に基づく画像処理時に時変光環境外乱の影響を受ない、という特徴がある。これは、撮影時の光環境状況が左右カメラの画像に同時にかつ同等に反映されるためである。この複眼の特徴を利用することで、時変光環境外乱に影響されない画像処理が可能となり、屋外の照度変化に影響されない空間計測が可能になる。
・今回、計測対象物の写真を事前に登録しておくことで、登録写真の変更のみでどんな対象物でも位置と寸法の計測が可能な計測システムを構築した。
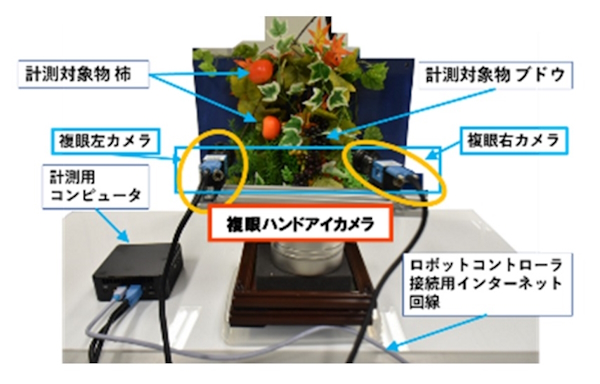
・また、任意対象物の位置・寸法計測装置を小型化することで、移動ロボットのハンド部への取り付けが可能(ハンドアイシステムと呼ばれる)となり、ロボットの動きによってカメラ視点を対象物(野菜・果物など)の近くに移動させて計測できることから、高精度な空間計測ができ、作物を正確に把持・収穫する農業用ロボットの開発が可能になった。
岡山大学発ベンチャーの(株)ビジュアルサーボ(見浪護特命教授(研究)が起業)は、ステレオビジョンを用いた空間計測について研究を続け、任意対象物の3次元位置姿勢を計測するコンピュータビジョン構築に成功し、泳ぐ魚の寸法計測などを行ってきた。
この画像計測方法は、左右複眼カメラに同じ対象物が写っていれば、その位置・姿勢・寸法の計測が可能であるという特徴があり、そのアイデアは、ビジュアルサーボ所有の特許6784991、6760656で権利化されている。今回、AI手法を用いた画像処理方法により、野菜や果物などの任意不定形対象物でも、位置・寸法の計測が可能となった。
農業用ロボットは、屋外の光環境が変化しても計測結果が変化しない計測特性が求められる。性能を確認するために野菜、果物、日用品を16種用意し、寸法を実測すると共に、屋外の日向(照度約52,000ルクス)および日陰(1,530ルクス)の光環境で対象物の寸法と3次元位置を計測し、日向と日陰の照度差に影響されない位置・寸法の計測を実証した。
上記の結果より、(1)果物・野菜・日用品の寸法と3次元位置を屋外で非接触での空間計測が可能なこと、(2)寸法計測結果は、屋外の日向・日陰の照度環境に影響されないこと、(3)補正後の寸法平均誤差は1[mm]以下、標準偏差は3[mm]程度であることが分かった。
今後、果物・野菜収穫用ロボットの開発を、(株)SECと共同で進める予定。収穫時に果物の熟度などの計測・寸法に基づく仕分け作業なども可能な多機能ロボットの開発を進め、2023年度中に農場でのフィールドテストを開始する予定であるという。
ニュースリリースサイト(okayama-u):https://www.okayama-u.ac.jp/tp/release/release_id1159.html