

3 水空合体ドローンの音響測位方式
3.1 基本構成
水空合体ドローンに適した音響測位システムには、2 に書いたような要件があるが、今回はその中でも、特に小型・低コスト・反射に強いという点を考慮したものを設計・開発した。複数ターゲットの同時測位については、当初は水空合体ドローン 1 式で動作することを想定し、まだ対応していない。
また、今回は水空合体ドローン自体が試作であったため、音響測位システムも柔軟に変更可能なものを短期間で開発する必要があった。
水中音響測位の方式は主として LBL(Long Base Line)、SBL(Short Base Line)、SSBL(Super Short Base Line) の 3 方式がある [8] が、小型という要件を考慮すると、SSBL 方式が最も適しているといえる。
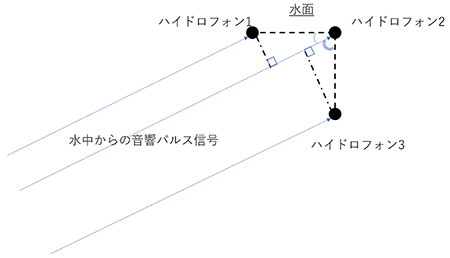
SSBL 方式について簡単に説明する。図 7 に示すように、空中ドローン側にハイドロフォン(水中マイク)が数 cm の間隔で 3 個、それらが直角二等辺三角形を成すように取り付けられている。音源が十分離れているとみなすと、音響パルスが各マイクに到達する時間差から、上記三角形の各辺と音源の方向との成す角がそれぞれ求まる。ここから、音源の存在する方向が特定できることになる。音響パルスの検出や各ハイドロフォン間の受信時刻差は、送・受信信号間及び受信信号同士間の相互相関関数の計算により、正確に求める。
水中ドローンにつける装置を小さく低コストにするため、トランスポンダー (音響パルスを受信したのちに送り返す) ではなくピンガー (音響パルスを発射するのみ) とした。また、反射波との分離を容易にするために、発射する音響パルスの周波数を比較的高く、パルス長を比較的短くした。すなわちパルスとしては周波数 50kHz 前後のチャープ信号、パルス幅は 1.6mS とした。周波数が高くなると距離による減衰が大きくなるが、水中ドローンの活動範囲は空中ドローンから数十メートルの範囲内であるため、50kHz であれば問題はない。
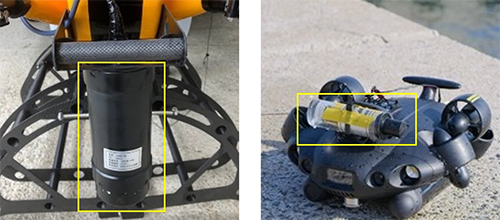
また開発期間短縮のため、ピンガーでの音響パルス信号生成処理は Arduino で、空中ドローン側のレシーバーでの受信信号処理は Rasberry Pi で行うこととし、ソフトウェア開発を比較的容易にしている。さらにピンガーの音波発生器 (トランスデューサー) と圧力センサ (後述) の部分については、[9] で述べた実験で使用したものを流用している (図 8)。なお、簡易的な音響測位技術は、[10, 11, 9] にあるように、動物の生態調査にも利用されている。ここでは、イルカの鳴き声 (超音波) を捉えることでその位置を把握している。
![図 8 ピンガーの中のトランスデューサー及び圧力センサ搭載部 [9]](https://sensait.jp/wp-content/uploads/2022/09/kawada_nishitani_kojima_08.png)
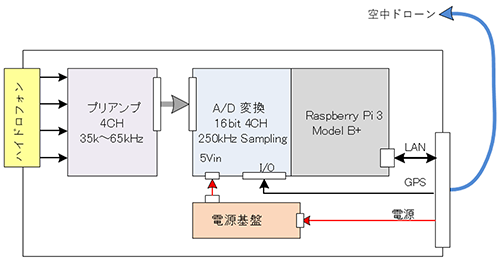
図 9 と図 10 にそれぞれピンガーとレシーバーのブロック図を示す。図 11 に示すように、水中ドローンにピンガー、空中ドローンにレシーバーを搭載し、水中ドローンの位置情報を LTE 経由で陸上まで送信している。運用者は地図上で空中・水中ドローンの位置を確認しながら遠隔操縦を行う。
表 2 に音響測位システムの主要諸元を示す。パルス幅が 1.6mS と短いため、ピンガーの電池持ちは比較的良い。
水中ドローンに搭載するのがトランスポンダーではなくピンガーであるため、SSBL では空中ドローンから
![図 8 ピンガーの中のトランスデューサー及び圧力センサ搭載部 [9]](https://sensait.jp/wp-content/uploads/2022/09/kawada_nishitani_kojima_09.png)
見た水中ドローンの相対的な方向しかわからない。絶対位置を特定するためには、両ドローン間の距離もしくは水中ドローンの深度が分かればよい。このため、つぎの 2 つの方法を備えている。
- ピンガーとレシーバーの基準時刻合わせピンガーとレシーバーの基準時刻を合わせ、ピンガーがどのタイミングでパルスを発射したかがレシーバー側で分かっていれば、受信時刻と音速の情報からピンガーまでの距離を知ることができる。レシーバー側は GPS により正確な時刻が分かるため、潜航前にピンガーとレシーバーの時計を同期させる。
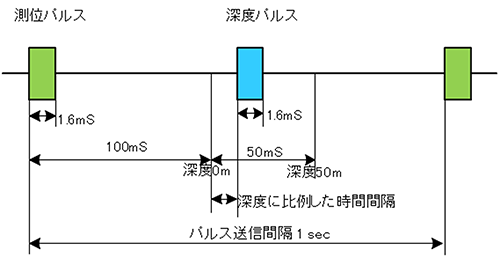
- 深度センサ (圧力センサ) の使用ピンガーは小型の深度センサ (圧力センサ) を搭載し、自身の深度が分かるようになっている。ピンガーからは音響パルスを 1 回に 2 個発生させることとし、このパルス間の間隔を深度に比例させた値に設定する (1 個目を測位パルス、2 個目を深度パルスと呼ぶ。図 12 参照)。
方法 (1) は GPS の受信可能な屋外でしか使用できず、方法 (2) はその他の場合も含め常に使用可能である。
しかし方法 (2) では、位置推定の精度が深度計の精度に依存することになる。
| 使用周波数帯 | 50kHz | |
|---|---|---|
| ピンガーの送波音圧 | 170dB re 1µPa@1m | |
| 測位レンジ | 300m | |
| レシーバー電源 | 5V1A | |
| ピンガー電源 | 乾電池/24 時間動作 | |
| 寸法・空中重量 | レシーバー | 90φ×220mm, 950g |
| Data size | ピンガー | 40φ×150mm, 220g |
3.2 ピンガーの時計のドリフトの影響
前述の通り、親機と子機の基準時刻の合わせこみを潜航前に実施し、以後は音響パルスの受信時刻から子機までの距離を算出している。このため、パルス発射時刻がずれてくると、測位誤差につながってくる。
レシーバーは GPS から得られる正確な時刻を使っているが、ピンガーの時計の精度は、レシーバーとの同期後は発信器の安定性に依存する。今回のピンガーに搭載できるような小型低消費電力の発信機としては TCXO(温度補償型水晶発振器)が適する。現状使用しているものの安定度(実力値)は 10ppb であるため、 3 時間連続稼働したとしても理論上最大 16cm の誤差に留まる。現状、水中ドローンは自動航行ではなく人間が伝送映像を見ながら操作していることを考えると、その測位誤差としては十分小さいといえる。
4 測位性能試験結果
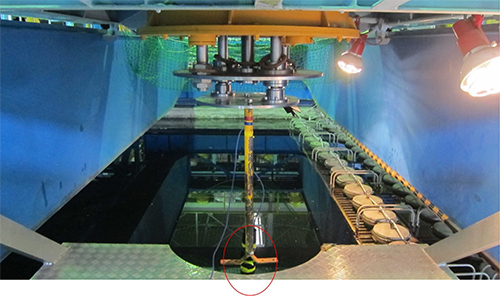
音響水槽にて、ピンガーを測位ターゲットとしてレシーバーを旋回装置に取り付け (図 13)、方位推定精度の確認を行った。旋回装置は一定の回転速度でゆっくりと 360 度回転し、その時の俯角と方位角を音響測位で推定した。
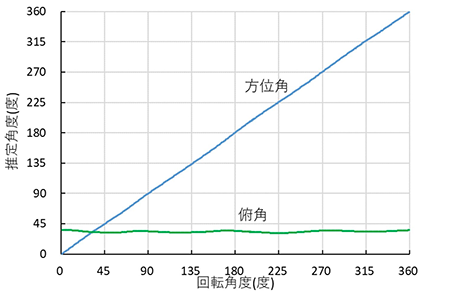
図 14 はピンガーの深度を 1.3 メートルとしたときの俯角と方位角の推定値である。またピンガー深度 1.3 メートルと 5 メートルの時の推定角度誤差を表 3 に示す。一般に SSBL 方式の場合、測位対象が浅い場所に
あり俯角が小さいと測位誤差は大きくなるが、表 3 では深度 5m の時に誤差 0.5 度以下、深度 1.3m であっても誤差約 1 度以下と、今回の利用シーン (水中ドローンは自律航行ではなく遠隔からの手動操作) のためには十分な高精度が出ている。
| ピンガーの深度(水平距離:2m) | 俯角推定誤差(標準偏差) | 方位角推定誤差(標準偏差) |
|---|---|---|
| 5 m | 0.2 度 | 0.5 度 |
| 1.3 m | 1.1 度 | 0.8 度 |
5 おわりに
本稿では、筆者らが開発している水空合体ドローンの音響測位システムについて説明した。小型化のため SSBL 方式とし、また浅海域で使用するため、音響パルスを反射に強い設計としている。さらに低コスト・短期間で開発するため、Arduino や Rasberry Pi を活用している。
現状、水中ドローンは遠隔からの手動操作となっているが、今後、自動潜航を実現するためには、音響測位の更なる安定化・高精度化が重要となる。このため方式改良を続けるとともに、多数のドローンが同時に作業可能とするため、複数のターゲットの同時測位機能も実現する予定である。
参考文献
- 海洋音響学会:“海洋音響の基礎と応用”, 成山堂書店 (2004).
- J. Kojima, H. Sugimatsu, T. Ura, R. Bahl, S. Behera and K. Nagahashi: “Development of a prototype underwater acoustic and motion recorder for the Ganges river dolphin”, Proc. IEEE Oceans, pp. 1–6 (2014).
- J. Kojima, H. Sugimatsu, T. Ura, R. Bahl, S. Behera and V. S. Sagar: “An integrated observation system with multiple acoustic arrays for underwater behavioral study of the Ganges river dolphins”, Proc. IEEE Oceans, pp. 1–6 (2011).
- J. Kojima, H. Sugimatsu, T. Ura, R. Bahl, S. Behera, H. Singh and V. S. Sagar: “Long-term real-time monitoring system for Ganges river dolphins using two sets of 6-hydrophone array systems”, Proc. IEEE Oceans, pp. 1–6 (2013).
【著者紹介】
川田 亮一(かわだ りょういち)
■略歴
1991年,東大大学院了.同年,現KDDI入社,研究所に勤務.映像処理,特に動き補正TV方式変換,画質評価/監視,画像符号化などの研究 開発に従事.1997~1998年,米コロンビア大客員研究員.2014~2016年,慶大SFC上席研究員(W3Cフェロー).2016~2018年,内閣府上席政策調査員.現在,水空合体ドローンの音響測位技術の研究開発に従事.博士(工学).
西谷 明彦(にしたに あきひこ)
■略歴
1986年,鹿児島県立鹿屋高卒.現 KDDI 入社後は,OSI 通信,分散システム,サイレント障害検知技術に関する研究に従事後,研究フィールドを海洋に移す.2016年より深海探査技術の世界大会に,日本チーム(Team KUROSHIO)の一員として挑戦.2019年より海中光無線技術の応用研究,水空合体ドローンの開発等に取り組み中.
小島 淳一(こじま じゅんいち)
■略歴
1981年,東工大大学院工学研究科修士課程了,国際電信電話株式会社(現KDDI株式会社)入社,海底ケーブルの保守・点検に関連する研究開発に従事.海底ケーブル調査・点検用の自律海中ロボット(AUV)を開発.近年は水中音響技術を応用した研究開発を行う.2021年,定年退職し現在に至る.2016年,科学技術賞(開発部門)受賞,IEEE会員.