
総合情報基盤センター
准教授 新井 イスマイル
3.磁気測位の研究動向
前章で述べた通り、磁気は屋内で分散しており測位の手がかりになりそうだが磁気の類似性と地理的な距離に必ずしも相関はないため、測位誤差の精度が低くなりがちである。この課題を解決するアプローチを数例紹介する。以降に参照する論文は無償でダウンロードできる和論文を選んだのでぜひ読んでいただきたい。
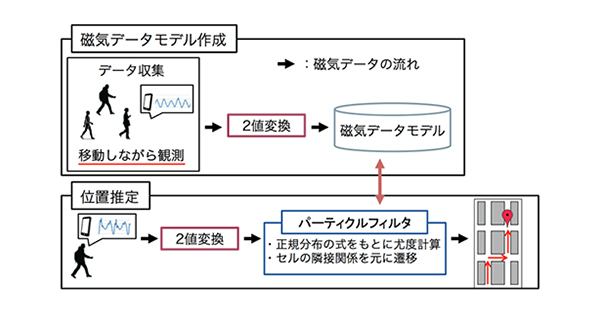
村田ら[2]は磁気センサデータを時系列で取り扱い、パーティクルフィルタによって測位する。パーティクルフィルタはロボットの位置推定でよく用いられる手法で、測位結果の候補となる複数のリファレンスポイントをパーティクル(粒子)として取り扱って尤もらしいリファレンスポイントを逐次見出す。1点のFPでは測位結果の候補が分散してしまう場合でも、時系列になっていれば磁気センサデータの変化パターンは絞り込みやすくなり、またパーティクルフィルタによって極端な移動も除外できる。
電磁気の影響を指摘する研究もある。寺井[3]は、大学や駅にて短期的に磁気が変動しそうな箇所にて定点磁気センシングして、測位に影響する変動が起こる箇所を特定し、そのような場所で磁場が大幅に乱れる期間を検知する手法を提案した。磁場が乱れる期間が分かればその間は既存の磁気測位を実施せずに直前の測位結果を保持したり、乱れている磁気自体を別の磁気マップとして保存しておいて状況に応じてマップを切り替える等の対処をすれば良い。各実験箇所での磁気の変化具合は以下の通りだった。
●エレベータ前:ドアの開閉の度に1μT程度の変化あり
●エレベータ前1m:大きな変化なし(エレベータ前より1μT程度の変動が大幅に減る)
●7Fエレベータ前(モータ近く):エレベータ前1mと違いなし
●レーザ複合機の前:動作時も変化なし
●電子レンジ前:動作時も変化なし
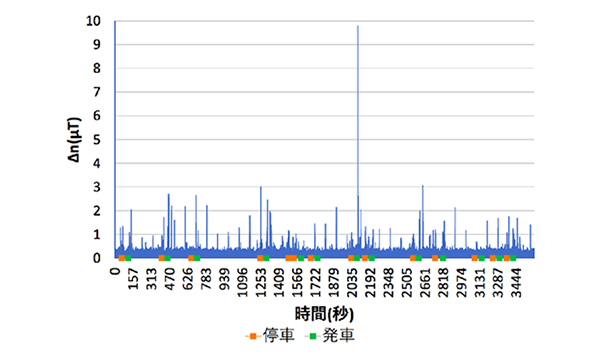
●第三軌道の線路下10m:電車発着の度に約2μTの変動あり(図 5)
エレベータ前でのドアの開閉と線路下だけ磁気変動の根拠が明確だが、前者は残留磁気を伴うドアが開閉して移動したことによるものと考えられ、またドアの目の前というピンポイントな箇所なため例外として無視した方がよく、結局電磁気による影響を考慮しなければいけないのは電車の架線くらいの大電流が近くで流れた時だけと言える。この研究では歩いている最中も向きや高さの変動で磁気センサ値が変動することを考慮して、3軸地磁気と3軸加速度の値をSVM(Support Vector Machine)の入力にして磁気変動の有無の2値分類問題を解いている。
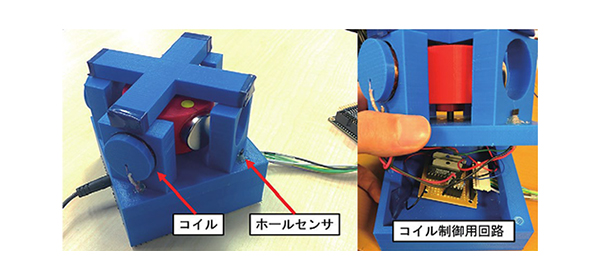
周囲的な磁気変動を意図的に発生させて磁気マーカとして用いる発想もある。武島ら[4]は円柱状の磁石をステッピングモータで数Hzで回転させる回転磁石マーカ(図 6)を製作し、距離と磁束密度の関係を利用して2m以内ならば最大で13cm以下の平均誤差、1.4m以内の範囲であれば4cm以内の誤差で測位できることを確認している。有効範囲が狭いのは想定する用途例が店内の棚までたどり着いた後になっていることと、強すぎる磁石を用いると磁気カードや電子機器の故障が危惧されるためだった。
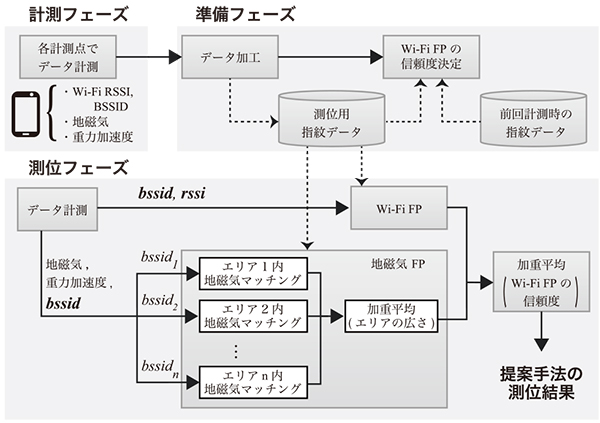
最後に、他の測位手法との組み合わせ事例を紹介する。前章でも紹介した通り、FPは無線LANベースの屋内測位でも用いられており、無線LAN基地局が環境中に複数設置されていることが前提となるが、例えば1つでも基地局が観測できればその周辺約100m以内であることを特定できる。一方で1つも基地局がなければ測位不能である。磁気FPは測位エリアが広ければ広いほど可能性のある測位誤差の範囲も広くなる。一方で、環境中への設備の設置が不要である。この両者の長短はうまく補完できるというのが東ら[5]の発想である。磁気も無線LANも測位時に1点しかFPしないが、予め準備フェーズで無線LANアクセスポイントから受信したビーコンの受信電波強度を基にレファレンスポイント毎の無線LAN FPの信頼度を計算しておき、測位時に無線LAN FPと磁気FPの測位結果候補を信頼度を基に加重平均を取る。基本的には無線LAN FPの補正手法として機能する立ち位置になるが、データベースに保存しているフィンガープリントの数を削減(一時的にビーコンを捕えなかったり、アクセスポイントの入れ替えでマップが劣化していることを想定)していっても他の既存手法と比べて測位精度の低下が低かったため、無線LAN FPと磁気FPをバランスよく利用できていることが証明できている。なお、学校の廊下100m程度の環境で実験した結果ではあるが測位誤差は中央値も平均値も10m未満に収まっている。
磁気測位、磁気フィンガープリンティング、Magnetic Fingerprintingといったキーワードでググるとまだまだ色んな手法が研究されている様子が確認できる。いずれにおいても最近の研究は他のセンサと組み合わせており、磁気センサ単体で実用レベルに達するものは今のところ確認できていない。大抵の場所では無線LAN基地局がなくてもセルラー通信の電波は受かっていたり、安価なBluetoothビーコンを設置すれば解決するからである。筆者が現在共同研究している清掃工場(クリーンセンター)ではその施設の性質上、僻地にあってセルラー通信も工場内だと見つかって1基地局だけであったり、空間が広すぎるためビーコンの設置・維持コストも高くなったり、無線LANを整備するほど通信の需要がなかったりして磁気FPの実用が期待されている。
4.おわりに
初期のスマートフォンから搭載される磁気センサは主に方角や姿勢を知るために利用されてきたが、屋内では特に残留磁気が原因で使用に支障があった。磁気を用いた屋内測位手法はその残留磁気の問題を逆手にとったものと言える。磁気の変化パターンは建物内の金属の量と性質に依存し、また対象空間が広くなればなるほど磁気単独での測位性能の維持は難しくなるが、他のセンサとの組み合わせによって測位に役立つセンサであることは3章で紹介した研究から明らかである。筆者らも磁気測位が活きると思われる清掃工場といった環境で研究を2020年から始めているが、本稿の読者らの新たな発想により、適するフィールドが広がったり、測位性能の飛躍的な向上のきっかけが生まれれば幸いである。
参考文献
2) 村田雄哉, 梶克彦, 廣井慧, 河口信夫, 神山剛, 太田賢, 稲村浩, “歩行時の磁気センシングデータを利用した屋内位置推定手法,” 情報処理学会論文誌, Vol. 58, No. 1, pp.57—67, 2017. http://id.nii.ac.jp/1001/00176872/
3) 寺井元基, “地磁気フィンガープリンティングの精度向上のための3軸の地磁気と3軸の加速度を用いたSVMによる地磁気の変化検知,” 奈良先端科学技術大学院大学情報科学研究科修士論文, 2019年3月. https://library.naist.jp/mylimedio/search/av1.do?target=local&bibid=90563
4) 武島知勲, 梶克彦, 廣井慧, 河口信夫, 神山剛, 太田賢, 稲村浩, “回転磁石マーカによるスマートフォンの3次元位置推定手法,” 情報処理学会論文誌, Vol. 59, No. 1, pp.138—149, 2018年1月. http://id.nii.ac.jp/1001/00185276/
5) 東和樹, 新井イスマイル, “相互補完型Wi-Fi・地磁気フィンガープリンティング手法の評価,” 情報処理学会論文誌, Vol. 58, No. 2, pp.384—395, 2017年2月. http://id.nii.ac.jp/1001/00177465/
【著者紹介】
新井 イスマイル(あらい いすまいる)
奈良先端科学技術大学院大学 総合情報基盤センター 准教授 博士(工学)
■略歴
2008年3月 奈良先端科学技術大学院大学情報科学研究科 博士後期課程修了
2008年4月 立命館大学 総合理工学研究機構 ポストドクトラルフェロー
2011年4月 明石工業高等専門学校 電気情報工学科 助教
2013年4月 同講師
2015年4月 同准教授
2016年4月 奈良先端科学技術大学院大学 総合情報基盤センター 准教授 現在に至る