
教授
沖 一雄
1.はじめに
リモートセンシング(Remote sensing)とは,対象物が反射または放射する電磁波をセンサで観測し,対象物に直接触れることなくその温度や形状などの情報を取得する技術である.衛星を利用したリモートセンシング技術の活用方法は広域な土地利用調査や地図の作成,人が立ち入ることのできない危険な場所の調査など多岐にわたる.その中で,収量増加、コスト削減などを目的として,農作物の生育モニタリングや土壌パラメータの推定など,リモートセンシング技術を農業に利用する研究も多くおこなわれている1)- 3).
既存のリモートセンシング技術には,衛星や航空機をプラットフォームとしたものや,現場における地上観測などがある.それぞれの手法には一長一短の特徴があり,例えば衛星画像を用いたリモートセンシングでは,一度に広大な範囲の画像を得ることができるが,画像取得時期が衛星の軌道によるため自由に選ぶことができず,欲しいときに欲しい情報が得られない場合がある.また,光学センサを用いたときに対象物が雲で遮られてしまう場合があることや,衛星画像の空間解像度では個別の作物を見ることができないため農業への適用が制限されるなどといった問題も存在する.航空機を用いたリモートセンシングでは,オペレーションコストが高いことから,衛星と同様,欲しいときに気軽にデータを得ることができない問題がある.地上観測では,自由な時間に詳細なデータが得られる一方で,広大な農地で実施するには多大な労力を要するといった問題が生じる.
上記のような制約が示唆される中,近年,リモートセンシングの新たなプラットフォームとしてUAV(Unmanned Aerial Vehicles)が注目されている.UAVとは,無人航空機のことを指し,一般にドローン(drone)と呼ばれることが多い.近年、UAVによる農業への応用を検証する研究が盛んにおこなわれている4)。 UAVを利用することで、飛行高度やカメラの種類によっては1cm以下の空間分解能での撮影が可能で, 既存のリモートセンシング技術とUAVによる画像取得を組み合わせることで、地上観測の幅広いデータ取得が可能になる。このアプローチは、衛星や航空機よりも安価で詳細であり、農作物の収量の増加や予測技術の向上が期待される。
本研究では、米国アリゾナ州の64 ヘクタールのピーカン果樹園で、近赤外域(0.7~1.0μm、解像度4cm)と熱赤外域(8~13μm、解像度40cm)を観測できる2台のカメラが搭載されたUAV を使用した連続モニタリング方法について報告する5)。
2.データ取得と解析手法
本研究では、米国アリゾナ州サンシモンのピーカンナッツの果樹園で UAV を使用して、可視近赤外画像と熱赤外画像を撮影した。これらの画像は、植物の葉の色や温度を監視することや樹高マップを作成するために使用された。
2.1 UAV による画像取得
観測はマルチコプタ型UAV(MATRICE 600)に2台のデジタルカメラ(可視近赤外カメラ、熱赤外カメラ)を搭載し、自動飛行によっておこなわれた(図1)。
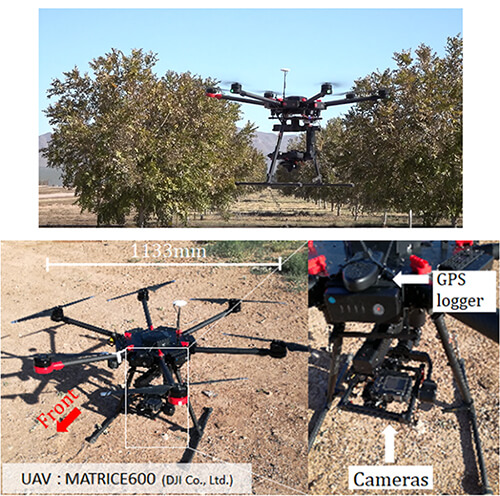
各カメラから取得した画像情報を表 1 に示す。本研究では、飛行高度 120 m で撮影したため、可視近赤外カメラと熱赤外カメラでそれぞれ約 4 cm と約 40 cm の空間分解能で画像が得られた。
| Visible Near Infrared | Thermal Infrared | |
|---|---|---|
| Name of device | Yubaflex | Thermoshot |
| Spectral bands | R, G, NIR(0.85μm) | TIR(8~13μm) |
| Pixel number | 4000pix×3000pix | 160pix×120pix |
| Viewing angle | H 72.32°× V 57.45° | H 28°× V21° |
| File format | RAW format | JPEG format with temp information |
| Spatial resolution |
4cm | 40cm |
| Data size | 12.5~14MB/image | 60~80KB/image |
撮影時の位置情報を取得するため、UAV には GPS ロガーが搭載され、 対象圃場の面積は約64ha(800m×800m)で、UAVバッテリーの制約から1圃場につき3回の飛行がおこなわれた。 現場では対空標識を設置し、画像間のマッチング精度を高めた。
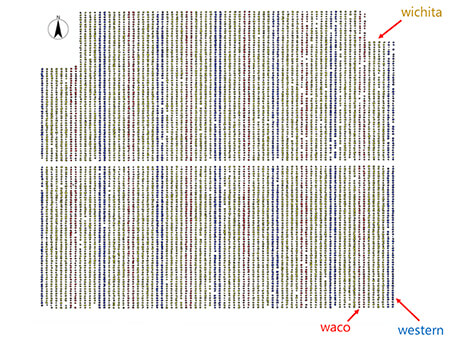
果樹園では、ピーカンナッツの樹木が東西方向に 35 フィート (10.7 m) ごと、南北方向に 20 フィート (6.1 m) ごとに8866本植えられており、図 2 に示すように、「Western」、「Wichita」、「Waco」と呼ばれる種類のピーカンナッツの樹木が東端から 2 列が「Western」、次の 5 列が「Wichita」、次の 2 列が「Waco」の順序で西端まで続いている。
UAVに搭載された可視近赤外カメラと熱赤外カメラにより撮影された画像に対して以下の処理をおこなっている。
- 可視近赤外カメラにより撮影された画像に対して標準白色版を用いて観測波長帯域(赤色波長帯域、緑色波長帯域、近赤外波長帯域)ごとに標準化し観測時の日射量を補正した。
- 可視近赤外カメラと熱赤外カメラにより観測された画像は、GPS ロガーの位置と時間の情報が関連付けられており、観測地点が把握できるようにした。
2.2 樹高マップの作成
樹高は、観測された画像からDSM(Digital Surface Model)を作成し推定された。DSMはオーバーラップした観測画像からSfM (Structure from Motion)により作成される。図3にUAVにより推定した樹高と実際に計測した樹高との結果を示した。
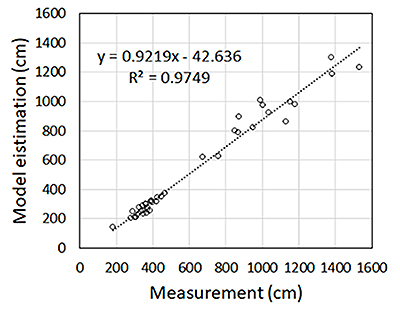
図3よりUAVにより推定した樹高は精度が良いことがわかる。
2.3 NDVI マップの作成
ここでは、ピーカンナッツ樹木の状態を評価するために、これまでリモートセンシングの分野で植生の状態を評価するために多く使用されてきた植生指数のひとつであるNDVI(Normalized Difference Vegetation Index)を用いた。NDVI は、可視の赤色光を吸収し、近赤外光を反射する植物の特性を利用した植生指数であり次式で表せる。
NDVI = (NIR – R) / (NIR + R) (1)
ここで、NIR と R はそれぞれ近赤外光と可視域の赤色光の反射率で、この値は -1 ~ 1 の範囲を示し、UAVのように高空間分解能で観測できる場合、葉のクロロフィル量が多いと 1 に近い値になる6)-9)。また、本研究における対象地域ではピーカンナッツの樹木間に生えているカバークロップもピーカンナッツの葉と同様に高いNDVI値を示すため、カバークロップとピーカンナッツの樹木を分離するために、本研究ではDSMを用いてピーカンナッツの樹木を抽出するマスク処理をおこなった。
2.4 熱赤外画像マップの作成
ここでは、観測された熱赤外画像を用いてピーカンナッツ樹木の評価を実施するためにピーカンナッツの葉を含めた地表面温度マップを作成した。熱赤外画像による地表面温度マップは8ビットデータで観測され、その観測の位置情報のずれにより画像の重なり部分が完全に一致しなかったため、本研究では、各画像の位置をGISソフトにより手作業で補正し、モザイク画像を作成した。
次回に続く-
参考文献
- 佐鳥新,ハイパースペクトルの活用と技術動向. 農業機械学会誌 70(3), pp.26-31 (2008).
- 李民賛, 笹尾彰, 澁澤栄, & 酒井憲司, NIR反射スペクトルによる土壌パラメータの推定. 農業機械学会誌 62(3), pp.111-120 (2000).
- David J. Mulla, Twenty five years of remote sensing in precision agriculture: Key advances and remaining knowledge gaps. BIOSYSTEMS ENGINEERING, 114, pp.358-371(2013).
- Chunhua Zhang, John M. Kovacs, The application of small unmanned aerial systems for precision agriculture: a review. Precision Agriculture, 13, pp.693-712(2012).
- H. Yamagata, K. Noda, J. J. Randall, H. Kamiya, K. Oki, Consecutive monitoring method for pecan orchards and discovery of a mysterious circle in a pecan orchard with UAV .Optical Review, 28 738-744(2021).
- Benedetti, R., Rossini, P., On the use of NDVI profles as a tool for agricultural statistics: the case study of wheat yield estimate and forecast in Emilia Romagna. Remote Sens. Environ. 45, 311–326(1993).
- Weier, J. and Herring, D.,Measuring Vegetation (NDVI & EVI) Earth Observation. NASA,(2000).https://earthobservatory.nasa.gov/Features/MeasuringVegetation/. Accessed 3 September 2022
- Hunt, E.R., Cavigelli, M., Daughtry, C.S.T., McMurtrey, J.E., Walthall, C.L., Evaluation of digital photography from model aircraft for remote sensing of crop biomass and nitrogen status. Precis. Agric. 6, 359–378 (2005).
- Swain, K.C., Jayasuriya, H.P.W., Salokhe, V.M., Suitability of low-altitude remote sensing images for estimating nitrogen treatment variations in rice cropping for precision agriculture adoption. J. Appl. Remote Sens. 1, 013547 (2007).
【著者紹介】
沖 一雄(おき かずお)
京都先端科学大学工学部 教授
東京大学生産技術研究所 特任教授
■略歴
1997年筑波大学大学院社会工学研究科博士課程修了後、国立環境研究所、群馬大学工学部、東京大学大学院農学生命科学研究科、東京大学生産技術研究所と異動し、現在、京都先端科学大学工学部および東京大学生産技術研究所に所属している。また、途中、イタリア・イスプラにあるJoint Research Centreへの研究留学や、数年間の内閣府総合科学技術会議へ出向(併任)の経験を持つ。研究では、一貫して環境、農業分野における衛星リモートセンシング手法の開発に従事してきたが、この頃、農業生産者に役立つドローンでのリモートセンシング手法の開発にも興味を持ち、是非、農学と工学の融合による食料生産技術分野の確立に貢献したいと思っている。食料生産技術研究会を運営中。