

山本 郁夫
1.はじめに
日本は四方を海に囲まれており、海洋まで含めた排他的経済水域EEZの面積は世界第6位、水域内の海の深さも含めた海水の体積は世界第4位である。海底鉱物資源、水産資源、海洋エネルギー資源等、海にはさまざまな資源が眠っており、それらを如何に活用するかで今後の日本の将来が決まると言っても過言ではない。海の資源の開発には、まず海の中を知ること、すなわち、海洋計測が必要であり、海洋計測項目は多種多様である。また、海は宇宙と同じく人が容易に踏み入ることができない極限環境の世界であり、調査のためには無人ロボットの活用に期待がかかる。そこで、本稿ではロボットによる海洋計測についての筆者らの取り組みについて説明し、併せて海洋エネルギー特区として長崎海洋エネルギー実証フィールドにて実施しているプロジェクトを紹介する。
2.ロボットによる海洋計測
ロボットによる海洋計測ニーズは多種多様である。1)ロボットの目的をきちんと定める必要がある。
うらしま等の大型長距離自律航走無人潜水機AUV(Autonomous Underwater Vehicle)では、多くのセンサが搭載できるスペースが潜水機内に確保できるため、テレビカメラ、ソーナー、CTD計、採水器など海中環境、地形計測のための多くのセンサを搭載して多目的な海洋計測が可能である。自律運動を可能とするために、位置計算用慣性航法装置、速度計、深度計、高度計、浮上時位置測定用GPS等運動計測用センサも搭載できる。しかしながら、小型の潜水機では搭載ペイロードに制限があるため、一目的ないし数目的に計測目的を絞る必要がある。
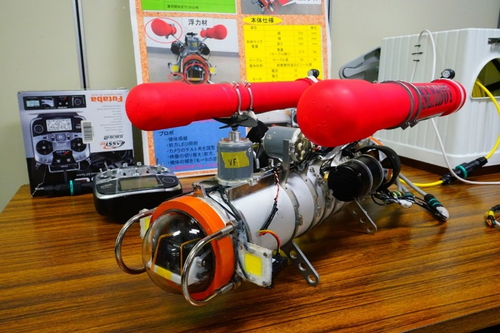
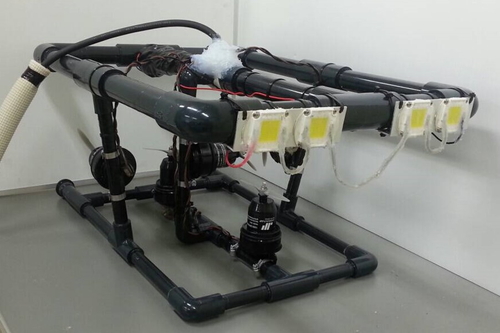
まず、画像による海中状況の計測ニーズがあり、センサとしてカメラと音響装置を用いる。図1、図2、図3に示す小型ROV(Remotely Operated Vehicle)では小型カメラを搭載し、LEDで海中を明るく照らしながら海中の目標物を画像にて計測する。例えば、図4に示す様な浮体式洋上風車の海中下コーン構造部の状況を画像にて計測するのに有効であり、図5に示すようにROVにて洋上風車コーン回りの環境や図6に示すようにコーン最下部の状況をリアルタイムモニタリングできる。
海中の電気伝導度、水温、圧力などの環境データの同時計測にはCTD計を用いるが、AUV、ROVのスペースとペイロードが確保できれば搭載できる。




次週に続く-
参考文献
1) Ikuo Yamamoto,Practical Robotics and Mechatronics,IET (The Institution of Engineering and Technology, UK),Control,Robotics and Sensors Series 99,ISBN978-1-84919-968-1(2016)
【著者略歴】
山本郁夫(やまもと いくお)
長崎大学副学長・教授
1983年3月 九州大学工学部航空工学科卒、同大学院工学研究科修了、博士(工学)。
1985年4月 三菱重工本社技術本部、
2004年4月 海洋研究開発機構、
2005年4月 九州大学大学院総合理工学府教授、
2007年4月 北九州市立大学教授、
2013年4月 長崎大学教授、
2019年4月 同大学副学長。
GlobalScot(スコットランド名誉市民)、フランス国際賞受賞。
専門はロボット工学。実用的なロボットを世界に先駆けて開発することで定評がある。三菱重工業株式会社で10000m(10900m)無人潜水ロボットやB787主翼、JAMSTECで300km(317km)以上を自律で航走する水中ロボットを開発してきた。大学では小型飛行体や小型水中ロボット、本物そっくりにおよぐ魚ロボットを世界に先駆けて開発している。宇宙遊泳する魚ロボットも開発した。30年以上のロボット研究歴の中で英国、フランス、日本などでPractical Roboticsの創出法に関する本など多く執筆している。