

准教授 辻 俊明
1.はじめに
IoT技術の浸透により、実世界から集められたデータを利活用した新たなサービスが様々な分野で生み出されている。特に情報環境と実世界を繋ぐインタフェースは産業創出の要となる技術である。例えばスマートフォン等の普及により実世界から膨大な量の画像・音声データの収集が可能となったが、そのデータの利用によって初めて実現された新たなアプリケーションの例は枚挙にいとまがない。
一方、視覚や聴覚に並ぶ五感の一つである触覚についてはどうだろうか。何かに触れた時の力を感じ取る触覚を記録・再生するためのインタフェースとしてロボットが第一に挙げられる。2015年に公表された我が国のロボット新戦略1)では、ITと融合した、言わば情報環境と実世界を繋ぐデバイスとしてロボットを発展させる方針が示されている。また、近年協働ロボットが急速に市場を拡大するのにともない、人とロボットが一緒に作業を行うケースが増えている。そして人とロボットの協働作業を通じて技能運動のデータを集め解析する試みも始まっている。このように人と情報環境を繋ぐインタフェースとしてのロボットへの期待は大きいが、ここで鍵となるのは力計測の技術である。
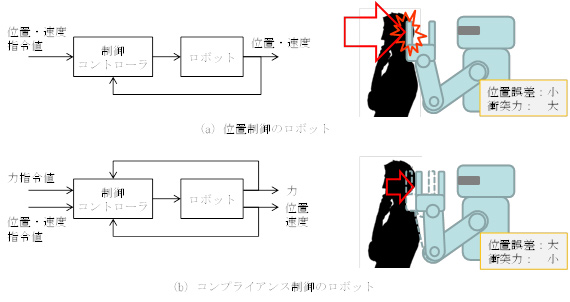
図1に人と協働するロボットに広く用いられるコンプライアンス制御の概念図を示す。これまでに工場などで広く実用化されている位置制御のロボットとの最大の違いは力を検知し、その値をロボットの制御に反映させる力フィードバック制御が必要な点である。コンプライアンスとは柔軟性を表す言葉であるが、力を検知し、その大きさを調整することで硬いロボットが柔らかく制御される。多くの場合力は手先の力覚センサで検知されるが、関節に回転力(トルク)を計測するセンサを実装することで、体のどこに触れても柔軟な動きを実現できるロボットも開発されている2)。
このような制御によって協働ロボットの安全性は高められるが、実用で運用しようとした場合には故障のリスクが深刻な課題となる。図1で示したようなコンプライアンス制御系で力覚センサが故障すると最悪の場合にはロボットが暴走し、人に危害を加える恐れがあり、そのリスクがロボットにおける力制御技術の浸透を妨げている。人とロボットが共存する社会を築くためには力覚センサの安全性は避けて通れない課題であるため、本解説では壊れにくい力センサの開発事例を紹介する。
次週に続く―
参考文献
*1) 「ロボット新戦略」ロボット革命実現会議(2015)
*2) G. Hirzinger, et al. “On a new generation of torque controlled light-weight robots.” in Proceedings of the International Conference on Robotics and Automation (ICRA2001), pp. 3356-3363, 2001.
【著者略歴】
辻 俊明(つじ としあき)
1978年7月9日生。2006年3月慶應義塾大学大学院理工学研究科総合デザイン工学
専攻後期博士課程修了。
同年4月 東京理科大学工学部第一部機械工学科嘱託助手。
2007年4月埼玉大学工学部電気電子システム工学科助教。
2009 年10月から2015年3月までJSTさきがけ研究員を兼任。
2012 年3月より埼玉大学工学部電気電子システム工学科准 教授、現在に至る。
2018年度,2019年度日本ロボット学会理事。再生医療とリハビリテーション学会
理事。博士 (工学)。
2006年度,2007年度ファナックFAロボット財団論文賞等を受賞。主として力覚センシングとその信号 処理に関する研究に従事しており、リハビリ支援ロボット,モーションコントロール技術に応用している