

東北学院大学 教授
松尾 行雄
3.自動尾数計測システムMagicCounter
MagicCounterは養殖魚の分養時に,生簀と生簀の網を繋いでつくった魚道(通過枠)に超音波の送受波器を設置し,通過する魚の個体数を海中でカウントするシステムである.図4は,実際のマダイの分養時の様子をカメラ(GoPro)で撮影したものである.マダイが密となって,魚道を通過していることがわかる.分養における魚検知ということで,対象までの距離が短いことを踏まえ,送信信号を従来に比べて短くした短パルス信号を用いる.短パルスを用いることで,適用できる距離は短いが,広帯域信号と同じような深度分解能を有し,密な魚群においても単体検知することが可能となる.
超音波の指向特性はカメラに比べて狭く,今回使用している送受波器の場合,5度程度である.したがって,一つの送受波器では魚道の全エリアをカバーすることができないため,複数個の送受波器を扇状に配置させる必要がある.分養における取り回しと尾数カウントの精度を考慮して,5個の送受波器を使用している.図5(a)に送受波器のシステムを示している.空中において,音を送信するためのスピーカと,音を受信するためのマイクは基本別々のものを使用することが多いが,水中においては,同じ機器を送信にも受信にも利用することが多い.今回のシステムも送受波器と名前がついているように,送信と受信を同時に行う機器となる.魚道をカバーするように5個の送受波器を設置した場合,魚のサイズによっては,それぞれの送受波器の指向特性から,図5(b)に示すように計測エリアと非計測エリアが発生する.この計測エリアと非計測エリアは,魚のサイズに依存していることから,MagicCounterでは,魚のサイズに対応した指向特性を設定することで,それぞれの送受波器で通過する尾数から,非計測エリアの通過尾数を予測する.この非計測エリアの予測通過尾数を合わせることにより,全体の通過尾数をリアルタイムに表示している.
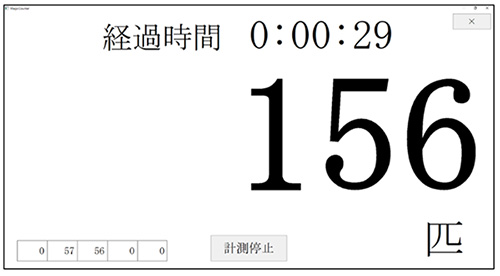
実証実験では,同じ生簀を複数回分養し,かつ,GoProでも水中での通過の様子を撮影した.その結果から,10%以内の誤差で通過尾数を評価できていることを示した(特許出願中:特願2022-189848).現在は,愛媛県にある養殖業者で運用を開始されており,ユーザーが機器をセットしたら,PCでアプリを起動しボタンを押すだけで開始でき,簡単に計測する事が可能となる(図6).加えて,計測データ,ならびに,解析されたデータはクラウドにアップロードすることで,精度の向上のために用いている.今後は,マダイだけでなく,ブリやカンパチやマグロなど他魚種に対応していく予定である.また,養殖業者ごとに生簀の形や大きさ,分養の方法は異なり,標準的なものがないと言える分野でもあるため,データの活用により,分養の仕方の標準化に取り組んでいく予定である.

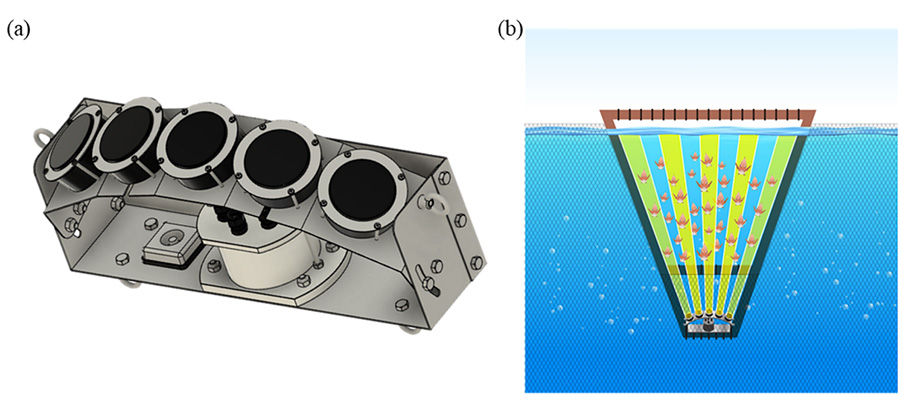
黄色のエリアが計測エリアとなり,非計測エリアが存在する.
4.おわりに
本稿では,海面養殖における分養時に通過する魚尾数を自動カウントするMagicCounterについて紹介した.海面養殖は長年行われているが,生簀内に本当に何尾いるかを把握できる仕組みがなく,経験と勘にたよる形しかなかった.MagicCounterを活用いただくことで,分養という作業により,生簀内の尾数をカウントできる画期的なシステムとなり,従来では不可能であった生簀の尾数を管理することができるようになる.生簀内の尾数を管理できることで,最適な給餌量につなげることができ,養殖事業の効率化につながり,今後の養殖において重要な役割を担う可能性があると考えている.
【著者紹介】
松尾 行雄(まつお いくお)
株式会社AquaFusion取締役 / 東北学院大学教授
■略歴
次世代水中可視化システムを開発するAquaFusionの共同創業者・取締役.山口県出身.2000 年東北大学大学院工学研究科電気・通信工学科博士課程退学.2001 年博士(工学).2000年から東北大学電気通信研究所助手,産学連携研究員等を経て,2005年東北学院大学教養学部准教授,2015年同教授となり,現在に至る.2017年株式会社AquaFusion設立.