

木下 航一
1.自動運転時代に求められるドライバモニタリング
近年、運転中のドライバをセンシングする技術への関心が高まってきている。この目的のひとつとして、ドライバ起因による交通事故を未然に防止することが挙げられる。統計によれば、日本における交通事故発生件数は2004年をピークとして減少しているものの、2018年の交通事故死傷者数は約58万人を超えており、依然として高い発生件数で推移している1)。事故原因の分析によると、発見の遅れ、判断の誤りなど、事故直前のドライバの行動・状態が不適切であることが要因の75%を占めている2)。そのため、ドライバが運転に適切な状態であるかをセンシングし、その状態に応じてドライバへの働きかけができれば、多くの事故を未然に防止できると考えられる。
一方、今後実用化が期待される自動運転においても、ドライバ状態をセンシングするニーズは高い。自動運転はその自動化段階によってレベルが定義されており、SAEインターナショナルによる5段階のレベル分けが一般的に使われることが多い。近年の自動運転関連技術の開発状況および自動車業界動向等から、自動運転の実用化は段階的に進展すると考えられており、当面の間はレベル0~2が主流を占めると予想される。レベル2までの自動運転においては、自動運転中もドライバが運転の安全に責任を持つこととなり、周辺状況や運転状態を監視することが求められる。また、道路環境や交通状況が自動運転システムの想定範囲を超える場合など、自動運転から手動運転への急な変更要請も発生することが想定され、そのような場合に備えてドライバは常に運転に即座に戻れる状態である必要がある。こういった状態を担保するため、ドライバ状態をモニタリングする機能が重要となる。
本稿ではドライバ状態を高精度に認識するためにわれわれが近年開発した3)「ドライバ運転集中度センシング技術」を例に取り上げ、自動車に搭載したセンサによってリアルタイムにドライバ状態をセンシングするための手法について解説する。
2. 運転集中度センシング技術の構成
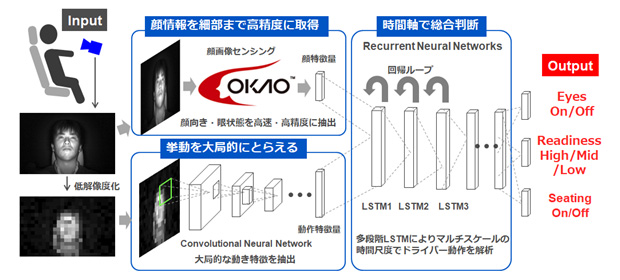
図1に本センサによるドライバ状態認識の処理の流れを記載する。カメラから得られた画像列に対して認識処理が適用される。認識処理は大きく分けて3つの要素から構成されており、まず顔画像センシング技術を適用することにより顔の局所的な情報を取得する。同時にConvolutional Neural Network(以下CNN)4) を用いドライバの姿勢に相当する特徴を取得する。そしてこれらの出力を統合し、再帰型ニューラルネットワークの1種である、Long Short-Term Memory(以下LSTM)5)を用いて、時々刻々変化するドライバ状態の遷移を認識する。以下各要素について概要を述べる。
参考文献
1) 平成30年警察白書 統計資料、警察庁ホームページ
2) 平成12年交通事故統計データ、 (財)交通事故総合分析センター
3) 日向匡史ほか,”自動運転時代におけるドライバモニタリング技術”、OMRON Technics, Vol.50 No.1, 2018.
4) Y. Lecun, L. Bottou, Y. Bengio and P. Haffner: “Gradient-based learning applied to document recognition”, Proceedings of the IEEE, 86, 11, pp. 2278-2324(1998).
5) S. Hochreiter and J. Schmidhuber: “Long short-term memory”, Neural Computation, 9, 8, pp. 1735-1780(1997).
次週に続く―