

機械知能工学科 教授
熊谷正朗
はじめに
ロボットはメカトロニクス機器のカテゴリーの一つである。明確な境界はないが、単なるメカトロにはセンシングをほとんど伴わない電子制御や、スイッチ類などによる単純な検出に基づくシーケンス動作なども含まれることに対して、ロボットではアナログ的な状態量を計測して、それと数学的な原理に基づく制御・判断をして動作することが多い。たとえば、以前からある産業用ロボットは各関節のモータの単軸の制御の上に、手先を望ましい位置・姿勢にもっていくための関節角度の計算理論がある。また、装置としては単純な掃除ロボットも、掃除機がよかれと思う方向に走行するために底面の駆動車輪を数学的に連動して走行させるという点で、車輪移動ロボットである。自動運転自動車は一般にはロボットと呼ばれていないが、非常に高度な自律・自立型の車輪移動ロボットであり、ドローンも複数のプロペラの推力を同時に調整することで運動性を確保する飛行ロボットの一種である。現実的には「ロボット」として世の中に認識されているものは「原理的なロボットっぽさ」を備えた上で、「ロボット」という名前をつけられ、かつ世の中に「ロボット」と認知された(「そんなものはロボットではない」とは思われていない)ものであると言える。(余談であるが、この認知のため、「ロボット」になるかどうかは、最初に目新しいものを世に出すときに「ロボット」と名付けるかどうかが重要であると思われ、電子レンジが「全自動調理機能付きオーブンレンジ」になるか、「料理ロボット」になるか、気になっている)
以上の観点から、ここでは、名前としての「ロボット」ではなく、「技術的な意味でロボットっぽいもの」(以下、単にロボット)のセンサについて概要を述べる。
ロボット用センサの傾向
上述のように、ロボットのセンサは、産業用のシーケンサ・PLCに接続するOn/Off接点型のセンサとは異なり、アナログ的な値、連続的な値を扱うことが一般的である。これは、ロボットにかかわる状態をそれらのセンサで得て、制御式や判断則に与えるためである(図1)。制御式の場合は、一般には、その連続値のまま演算を進め、ハードウエアに出す指令も連続値による出力操作である(ハードに近い下位レベルでは電圧・電流等、中位では関節角度・速度、上位では位置姿勢など)。
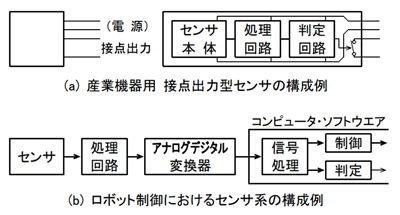
対して判断に用いる場合は、連続値としての出力する場合もあるが、いわゆる「判断」の場合には最終的に何らかの2値化処理を行い、OK/NG、動作モードの遷移、緊急停止、などの判定をすることが多い(たとえば、近年生産設備で一般化している画像による判断システムも、画像処理の段階までは連続値であるが、最終的には一致判定などのOK/NGで出す;そもそも画像処理は「ロボットの目」をつくる意図のあった研究分野でもあった)。なお、ここでいう「連続値」は厳密には連続ではない。メカトロ全般にセンサ信号をコンピュータに取り込む段階などでなんらかのデジタル化をしており、その時点で離散化している(値が飛び飛びになる)(※ロータリーエンコーダのように原理的に離散的な場合もある)。その離散化を十分に細かくすることができれば、その前のセンサの分解能が十分で、その後の数値計算で十分な分解能(桁数)を確保していれば、連続値と見なしうる、という意味である。
この観点で対比されるセンサの例を一つあげる。小型の距離測定(測距)センサにPSD測距センサと呼ばれるものがある。これは、PSDという、ある程度の長さ・面積をもち、どこに光が当たったかを測定できる光センサと、光源、光学系を組み合わせたセンサモジュールで、三角測量の原理を用いてセンサ前方の対象物からの反射光によって距離を測定するセンサである。このセンサの主要なモデルの一群は「ある距離を境に」On/Offの出力がでる形式であり、センサ前に「ものがあるかないか」を判定する(たとえば、男子トイレの自動水栓に使われているようである)。一方、本来はアナログ計測をしているセンサであり、アナログ電圧で距離に応じた出力が出るものもラインナップされ、ロボットの簡易的な障害物距離センサや、ロボットコンテスト用ロボットなどにしばしば使用されている。
次週に続く―
著者
熊谷正朗(くまがいまさあき)
東北学院大学工学部 機械知能工学科 教授
略歴:
2000年 東北大学大学院工学研究科修了、博士(工学)。同年 東北大学助手。2003年東北学院大学講師、助教授、准教授を経て、2013年教授。2008年より仙台市地域連携フェローを兼任。
主にメカトロニクス、ロボット系の講義を担当し、仙台市地域連携フェローでも「基礎からのメカトロニクスセミナー」を実施。