

大学院工学研究科 教授
田中 由浩
3.皮膚振動に基づく触覚評価
3.1 ウェアラブル皮膚振動センサ
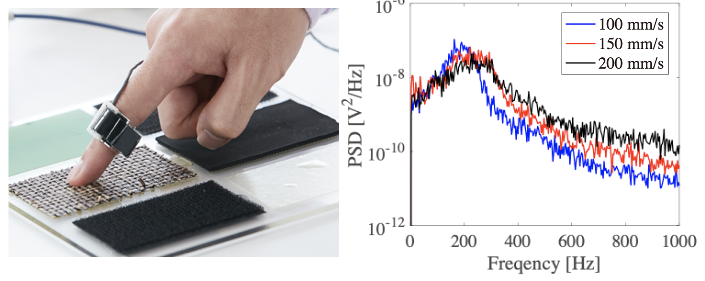
これまでに述べた触感に作用する皮膚や運動の特性を考慮し,皮膚を伝播する振動を検出して主観的な触覚を情報化することを考案した.特に,指全体の動きによらず純粋に皮膚の振動を検出するため,高分子圧電材料を指に巻きつける方法をとった7).図5左に示すようにPVDF(PolyVinylidene DiFluoride)を指の第2指腹部に巻きつける.これにより対象に直接触れることができ,感覚運動制御に干渉せず,自然な触知覚を行うことができる.取得される情報は,対象物の物理量だけでなく皮膚や運動の特性を含み,同じ対象物でも皮膚の硬さや押付け力などによって得られる情報は変化する.しかしながら,それが人が皮膚を通じて検知している情報であり,主観的触覚情報と対応するものと考えている.関連する事例として,なぞり速度と皮膚振動の関係がある.例えば,一定の直径を有するマイクロビーズを敷き詰めた試料を準備する.これを100, 150, 200 mm/sの異なる速度で指先でなぞった際の皮膚振動を計測すると,共振周波数はほとんど変化しない13)(図5右).対象表面の情報を正確に捉えられれば,共振周波数は速度に比例すると考えられる.しかしながら,実際は凹凸に応じて皮膚が振動を起こすことから,皮膚の粘弾性に基づく共振周波数が支配的に作用したと考えられる.実際,私たちの日常生活においても,なぞり速度を倍にしたからといって,触感が変化するとは限らない.
3.2 評価の応用事例
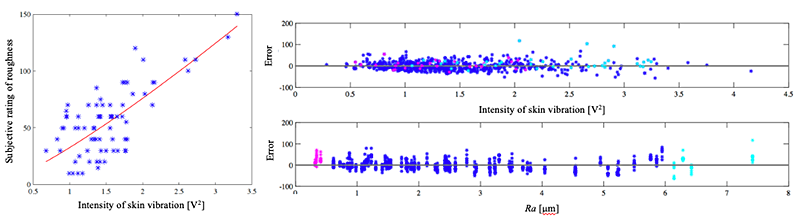
上述のセンサを様々なテクスチャーの粗さ感の評価に応用した14).センサで皮膚振動を計測しながら触感の評価を行えることに着目し,78種類の試料をなぞった時の皮膚振動とその時に感じた粗さ感をマグニチュード推定法で回答してもらった.センサ出力の評価指標としては,10-1000Hzのパワースペクトル密度の総和を用いた.図6左に被験者1名の結果を示す.図に示すように,皮膚振動が粗さ感と良好に対応することが確認できる.さらに,比較として,粗さの指標として良く用いられる算術平均粗さも計測し,べき関数で推定した値と実際の感覚値との差(ノルム)を全試料及び全被験者に対してプロットした結果を図6右に示す.図を見ると算術平均粗さでは,各値に対して縦にプロットが並んでいる.これは試料が同じであれば物性値は同じあるが,粗さ感の評価値は被験者に応じて変化していることを意味している.一方,皮膚振動では,同じ試料でも得られる数値が異なる.そして,ノルムは算術平均粗さと比較して全体的に小さい.これは皮膚振動と粗さ感との対応を示す結果であり,私たちの触感が対象物が同じでも個々人の皮膚や運動特性によって異なることを示唆している.この他に,皮膚の洗い上がりの触感と皮膚振動との対応関係や個人差15),布地の物性値と皮膚振動,摩擦係数を用いた手触り感評価16)が示されている.
触覚は,対象と皮膚との力学的相互作用の結果であり,一期一会と考えている.人の触知覚における支配的な機械刺激やその情報処理,また感覚運動制御は十分明らかになっていない.本センサのように人が取得する機械刺激を情報化することで得られる知見は触知覚メカニズムの解明にも貢献する.その知見は,将来のセンサ開発や計測方法の確立に繋がるであろう.
4.触覚の伝送
これまで触覚の情報化について特に評価を中心に述べてきたが,人の主観的触覚の情報化は,自身や他者,ロボットへ伝送することによる応用もある.触覚は対象と皮膚との接触面においてのみ生じるものであり,視聴覚と異なり元来共有はできない.しかしながら,情報化することで,他者に触覚を伝送したり,自身の他の部位に触覚を返したりできる.さらに触覚は,対象の識別だけでなく運動とも密接であり,握手やハグに代表されるようにコミュニケーションとしても効果を持つ.身体にボンディングしている触覚を情報化し,記録,編集,伝送,提示,再現できるようになることは,様々な応用可能性を秘めている.
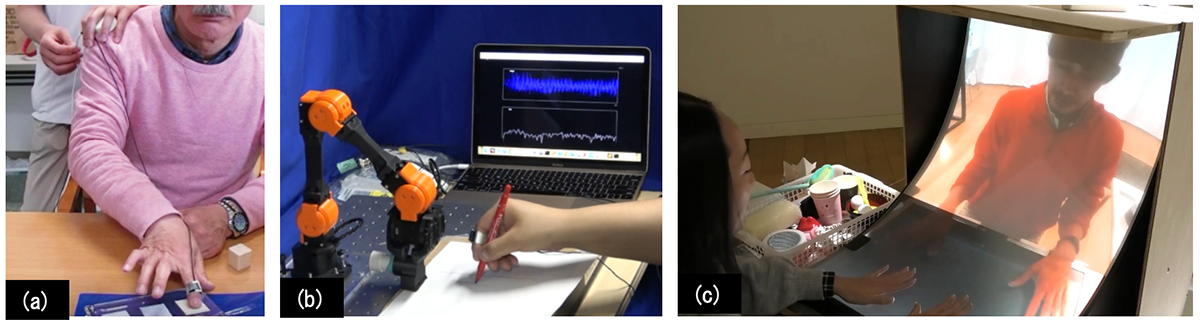
ここでは筆者らが行なっている触覚伝送による応用を3つ紹介したい.一つは,触覚フィードバックによるリハビリテーションである17).脳卒中患者の中には感覚が鈍磨する方がいる.重度に感覚が鈍磨になった患者に対して,当該指先に上述したセンサを装着し,対象に触れた時やテクスチャーをなぞった時の皮膚振動を計測し,これを触覚を感じることができる部位に代行的に振動子により提示する(図7(a)).その結果,物体を把持する際の過剰な力が減少するなど,運動の向上が見られた.
二つ目は,触覚の共有による協調作業である.他者やロボットに自身の指先の触覚を伝えることで,自身の触覚が伴う運動状態を伝えることができ(ロボットの場合,機械学習による人の運動識別が有効),その情報を基に他者やロボットは運動を決定し,協調作業を行うことができる.さらに他者やロボットからの触覚も得て,触覚の共有を双方向にすることで,協調作業を一掃円滑にできる.これまでに,2人で物体を持ち上げたり,人がボールペンで紙に線を引く時にロボットが適切な力で紙を押さえたり,ロボットが適切な力でボトルを把持して人が蓋を開けることを支援したり,人とロボットの間で連続する動作を円滑に繋げたりするシステムを構築してきた18)19)(図7(b)).
三つ目は,触覚共有によるコミュニケーションである.他者に自身の触覚を与えることができるようになったことで,遠隔触診への発展がまず考えられるが,直接的な情報伝送の価値だけでなく,私たちの心理や行動がどのように変容するかも興味深い.筆者らは,机を叩いたり擦ったりした時の振動が遠隔地にある同じ机に再現される装置を開発し,これを用いた視聴触覚コミュニケーションを実験した20)(図7(c)).体験者には視聴覚のコミュニケーションに触覚が付与され高い実在感を与えられ,親密性の醸成に寄与しながら触覚コミュニケーションの発達が見られた.
5.おわりに
対象物の情報ではなく,対象物と皮膚との力学的相互作用である現象の情報として触覚を捉え,その数値化の意義や応用について述べてきた.特に振動を中心に述べてきたが,温度や圧力も触覚として重要な刺激であり,さらに手や指だけでなく,触覚は全身にある.主観的な触覚を情報化するための様々なセンシング技術は,人々の知覚認知の拡張だけでなく,運動や行動,情動に作用し得る応用技術に発展できるだろう.
謝辞
本研究の一部は,JSPS科研費22686026, 17H01252,19K22871,JSTさきがけJPMJPR14D7,JST ムーンショット型研究開発事業 JPMJMS2013の支援を受けて行われたものです.
参考文献
- Y. Tanaka, D. P. Nguyen, T. Fukuda, A. Sano, Wearable skin vibration sensor using a PVDF film, Proceedings of the 2015 IEEE World Haptics Conference, pp. 146-151 (2015).
- K. Kimura M. Natsume, Y. Tanaka, Influence of scanning velocity on skin vibration for coarse texture. Proceeding of the EuroHaptics 2018, pp. 246-257 (2018).
- M. Natsume, Y. Tanaka, W. M. Bergmann Tiest, A. M. L. Kappers, Skin vibration and contact force in active perception for roughness ratings, Proceedings of the 2017 26th IEEE International Symposium on Robot and Human Interactive Communication, pp. 1479-1484 (2017).
- 橋本雅俊, 五十嵐崇訓, 尾崎慎吾, 舛井喬, 田中由浩, ウェアラブル皮膚振動センサを用いた洗浄肌の触感評価, 第80回SCCJ研究討論会要旨集, (2017).
- 伊豆南緒美, 田中由浩, 佐藤真理子, 皮膚振動・摩擦と衣素材の触感に関する研究, 繊維学会誌, 77(9), 239-249 (2021).
- 河島則天, 田中由浩, 脳卒中後感覚障害に対する振動を介した知覚惹起の試み-振動子を介した物体への接触タイミングの認識-, LIFE2018講演論文集, OS2-8 (2018).
- K. Katayama, M. Pozzi, Y. Tanaka, K. Minamizawa, D. Prattichizzo, Shared haptic perception for human-robot collaboration, Proceedings of the EuroHaptics Conference, pp. 536-544 (2020)
- Y. Tanaka, S. Shiraki, K. Katayama, K. Minamizawa, D. Prattichizzo, Bilaterally shared haptic perception for human-robot collaboration in grasping operation, Journal of Robotics and Mechatronics, 33(5), pp. 1104-1116 (2021).
- 早川裕彦, 大脇理智, 石川琢也, 南澤孝太, 田中由浩, 駒﨑掲, 鎌本優, 渡邊淳司, 高実在感を伴う遠隔コミュニケーションのための双方向型視聴触覚メディア「公衆触覚伝話」の提案, 日本バーチャリリアリティ学会誌, 25(4), pp. 412-421 (2020).
【著者紹介】
田中 由浩(たなか よしひろ)
名古屋工業大学大学院工学研究科 教授
■略歴
2006 年東北大学大学院工学研究科修了.同年より名古屋工業大学助手,特任助教などを経て,2015 年同准教授,2021年教授,現在に至る.これまでに JSTさきがけ研究者,ユトレヒト大学客員助教,藤田保健衛生大学医学部客員准教授,秋田大学産学連携推進機構客員教授などを兼任.触覚を現象的に捉え知覚メカニズムの解明,およびそれを活用した触覚デバイスの開発と応用研究に取り組んでいる.錯覚や知覚メカニズムに基づく触感デザイン,触覚フィードバックによる感覚運動制御の支援,触覚の共有による人―人/ロボット協調システム,触覚コミュニケーションの研究などに従事.Advanced RoboticsおよびIEEE Transactions on HapticsにおいてAssociate Editorを務める.博士 (工学).